5-4
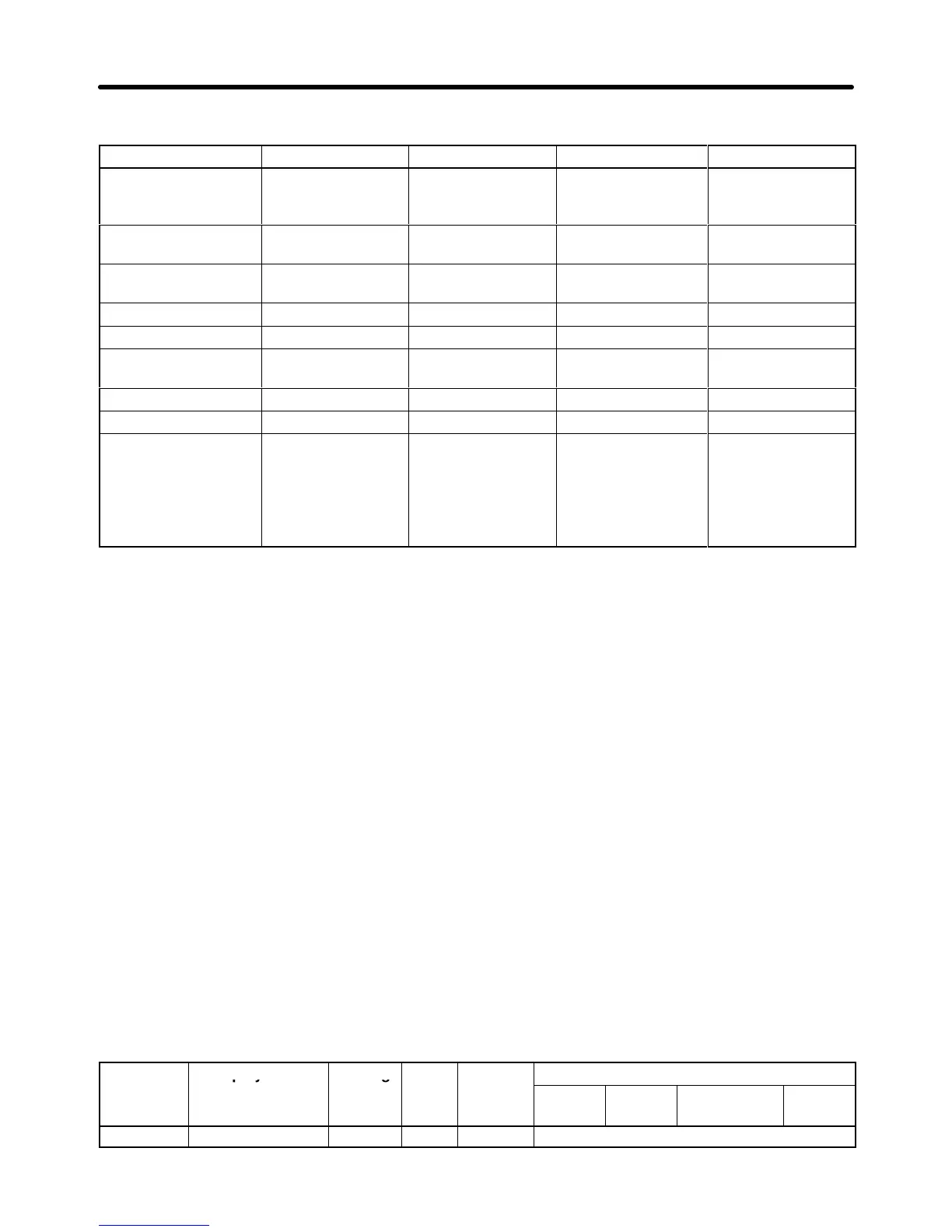
Control Mode Characteristics
Characteristic V/f Control V/f w/PG Fdbk Open Loop Vector Flux Vector
Basic control method Voltage/frequency
control (open loop)
Voltage/frequency
control with speed
compensation
Current vector con-
trol without PG
Current vector con-
trol with PG
Speed detector Not required Required
(pulse generator)
Not required Required
(pulse generator)
Optional Speed
Detectors
Not required 3G3FV-PPGA2 or
3G3FV-PPGD2
Not required 3G3FV-PPGB2 or
3G3FV-PPGX2
Speed control range 1:40 1:40 1:100 1:1,000
Starting torque 150%/3 Hz 150%/3 Hz 150%/1 Hz 150%/0 Hz
Speed control preci-
sion
±2 to 3% ±0.03% ±0.2% ±0.02%
Torque limit Not possible Not possible Possible Possible
Torque control Not possible Not possible Not possible Possible
Example applications • Multiple motors • Simple speed
feedback control
• Variable speed
drive applications
• Simple servo
drives
• Precision speed
control
• Torque control
Note V
ector control has a greater starting torque and more precise speed control than V/f control, so
use
of vector control is recommended whenever possible. Use V/f control in the
following types of
applications:
S When several motors are being operated
S When special motors such as submersible motors or spindle motors are being used
(Situations in which auto-tuning cannot be used.)
S When operation is being coordinated with an older inverter control system
5-1-2 Frequency Reference Settings from Control Circuit
Terminals
These settings are required when inputting analog voltage or current signals from the control circuit
terminals.
H Frequency Reference Selection (b1-01)
Parameter b1-01 is used to select the reference source; it cannot be changed during operation.
Parameter Display name Setting Units Default
Valid access levels
number