H2
Digital Outputs
Function selection for multi-function outputs
OK OK OK OK
H3
Analog Inputs
Adjustment/function selection for external analog inputs
OK OK OK OK
H4
Analog Outputs
Adjustment/function selection for multi-function analog
outputs
OK OK OK OK
H5
Serial Com Setup
Not Used. (Do not change this setting.)
--- --- --- ---
Protection
L1
Motor Overload
Sets electrical/thermal functions that protect the motor
. OK OK OK OK
L2 PwrLoss Ridethru
Selects the power-loss processing method.
OK OK OK OK
L3
Stall Prevention
Accel/Decel stall prevention settings and selection
OK OK OK OK
L4
Ref Detection
Frequency detection settings and selection
OK OK OK OK
L5
Fault Restart
Fault restart function settings
OK OK OK OK
L6 T
orque Detection
Sets overtorque detection functions 1 and 2 (by current)
OK OK OK OK
L7 T
orque Limit
S
T
orque limit function settings
--- --- OK OK
L8
Hdwe Protection
Hardware overheating and phase loss protection settings
OK OK OK OK
Operator
o1
Monitor Select
Selects the Operator
’
s display and setting methods.
OK OK OK OK
o2 Key Selections Operator’
s key function selection and other parameters
OK OK OK OK
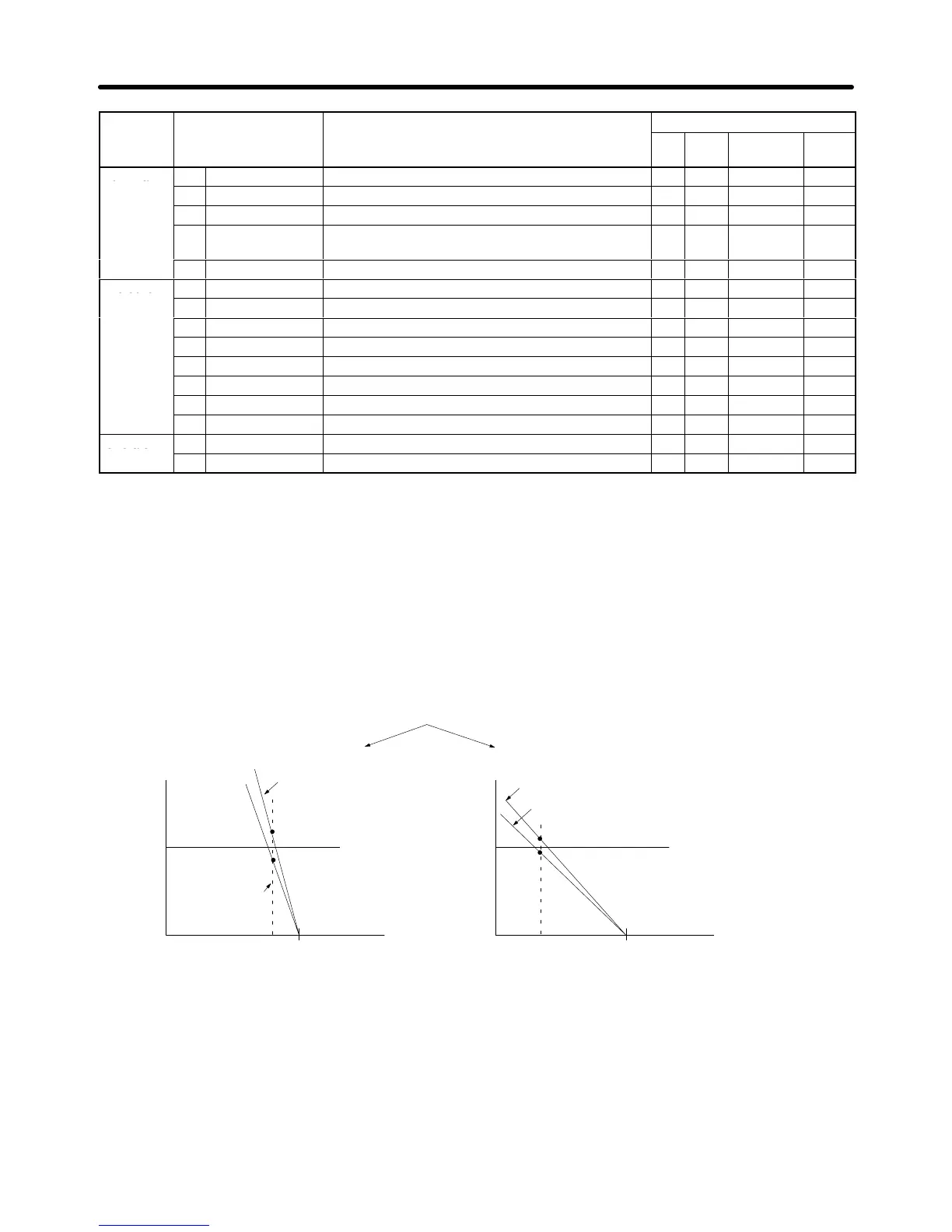
6-3-2 Droop Control Function
Droop control is a function that
allows the user to set the amount of motor slip. When a single load is
operated
with two motors (such as in a crane
conveyor), a high-resistance motor (a motor in which the
secondary
winding’
s resistance is increased resulting in an increased amount
of slip) is normally used
to adjust the load balance, as shown in the following diagram.
The balance of the load is very different with different amounts of slip.
Torque
Load torque
Motor A’s torque
characteristics
Motor B’s torque
characteristics
SpeedReference
speed
• Load balance when using a general-purpose motor
Torque
Load torque
Motor A’s torque characteristics
Speed
Reference
speed
• Load balance when using a high-resistance motor
Motor B’s torque characteristics
T
A
T
B
T
A
T
B
T
A
–T
B
>>0
T
A
–T
B
'
0
If
droop control is used, a high-resistance motor
’
s characteristics can be set for a general-purpose mo
-
tor.
Also, it is easy to make adjustments while watching the load balance because the amount of slip can
be set arbitrarily.
Set the amount of slip in parameter b7-01 as the percentage of slip when the maximum frequency is
input and the rated torque is generated. Droop control is disabled if b7-01 is set to 0.0.
Advanced Operation Chapter
6