6-27
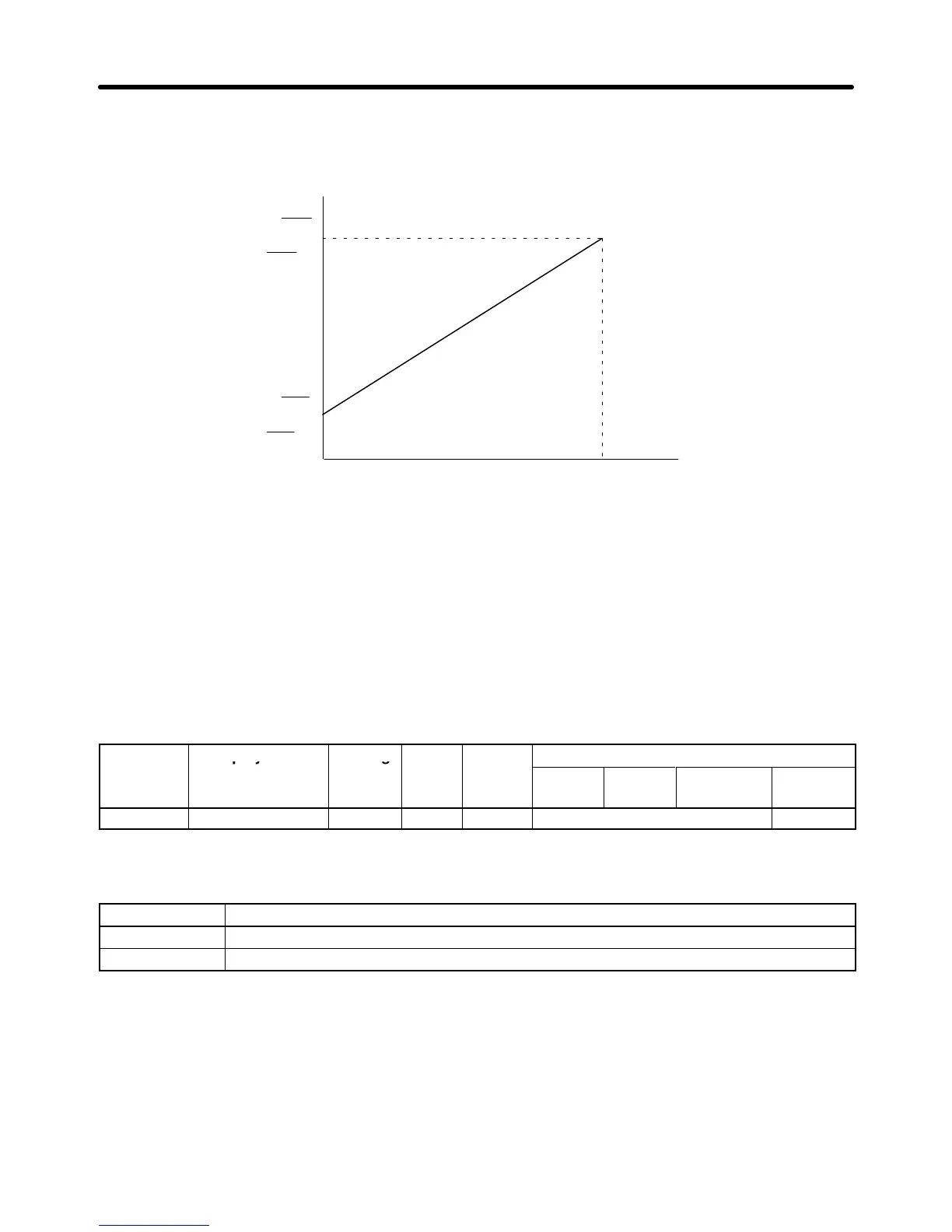
When the input terminal is used for torque compensation:
A
0-V (4 mA) input indicates a torque compensation that
is 100% of the motor
’
s rated torque.
Reference
value
Max.frequency
Gain
100
Max.frequency
Bias
100
Input voltage
(Input current)
10 V
(20 mA)
0 V
(4 mA)
Ratedtorque
Gain
100
Ratedtorque
Bias
100
Note Use the current values shown in parentheses when current input has been selected.
6-3-5 Speed/Torque Control Switching Function
It
is possible to switch between speed control and torque control when
one of the multi-function inputs
(H1-01 through H1-06) is set to 71 (Speed/T
orque Control Change). Speed control is performed when
the input is OFF and torque control is performed when the input is ON.
H Torque Control Function Settings
Parameter Display name Setting Units Default
Valid access levels
number
range setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
d5-01 Torq Control Sel 0 or 1 --- 0 Not applicable. Advanced
Note This parameter cannot be changed during operation.
Settings
Setting Function
0 Speed control (controlled by C5-01 through C5-07)
1 Torque control
Note Set
parameter d5-01 to 0 (speed control) when using the speed/torque control switching function.
H Setting the Speed/Torque Control Switching Timer
This
setting specifies the delay (0 to 1,000 ms) between a change
in the multi-function input (ON
→
OFF
or OFF → ON) and the corresponding change in the control mode. The timer setting is effective only
when 71 (Speed/Torque Control Change) has been set in one of the multi-function inputs (H1-01
through H1-06).
Advanced Operation Chapter
6