6-26
Note 3. When
supplying a voltage input to the frequency reference current input (terminal 14), be sure
to
disconnect jumper
wire J1 on the control board. If the jumper wire isn’t disconnected, the
input resistor will be destroyed. Refer to page 6-22 for a diagram of the control board.
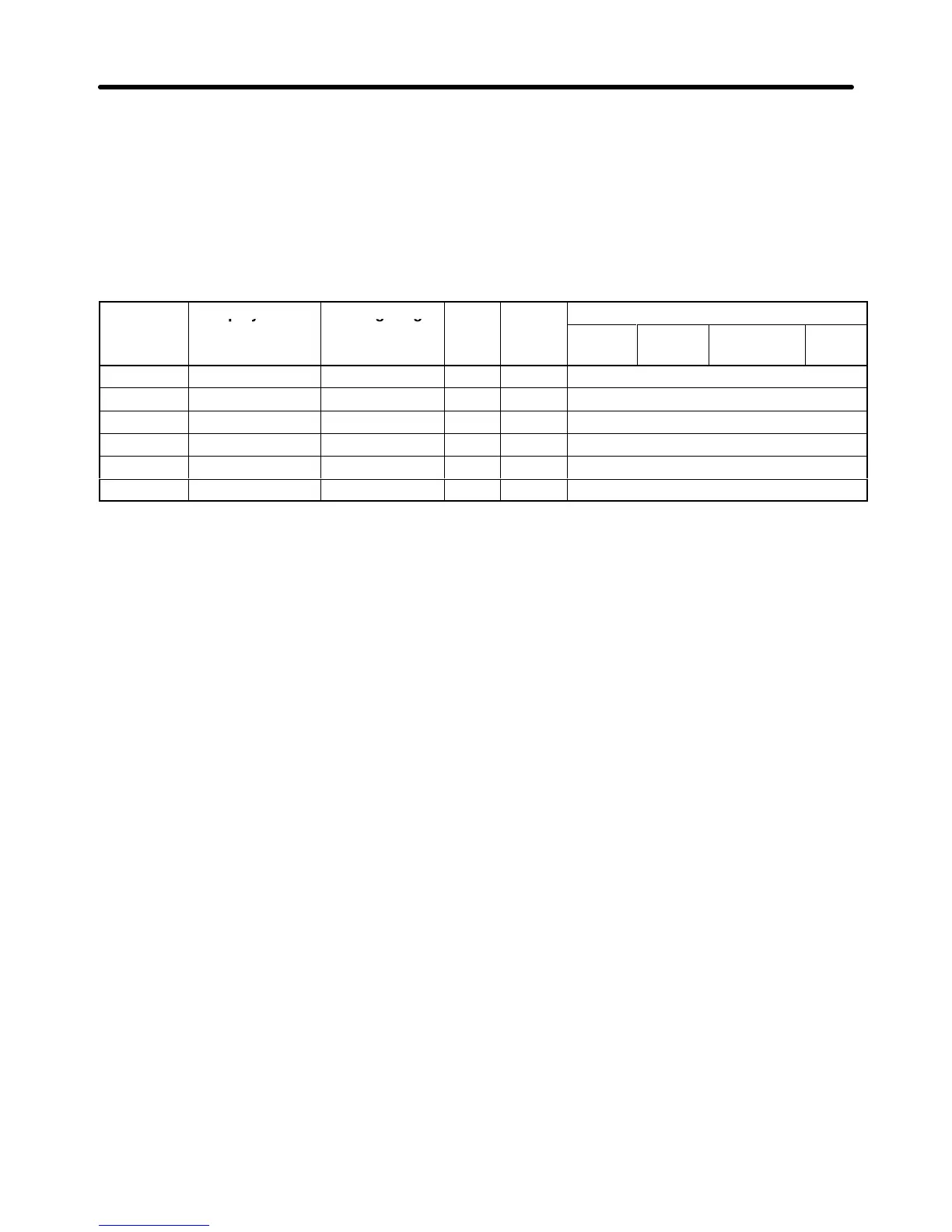
D Adjusting the Gain/Bias of the Analog Inputs
• Adjust
the gain and bias for the frequency reference (voltage), frequency reference
(current), and mul
-
ti-function
analog inputs
according to the input specifications for each input. The following parameters
can be changed during operation.
Parameter Display name Setting range Units Default
Valid access levels
number
setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
H3-02 Terminal 13 Gain 0.0 to 1,000.0 % 100.0 Basic or Advanced
H3-03 Terminal 13 Bias –100.0 to 100.0 % 0.0 Basic or Advanced
H3-06 Terminal 16 Gain 0.0 to 1,000.0 % 100.0 Basic or Advanced
H3-07 Terminal 16 Bias –100.0 to 100.0 % 0.0 Basic or Advanced
H3-10 Terminal 14 Gain 0.0 to 1,000.0 % 100.0 Advanced
H3-11 Terminal 14 Bias –100.0 to 100.0 % 0.0 Advanced
Note 1. Adjust
the gain so that the maximum signal level corresponds to the maximum frequency
or
the motor’s rated torque, as follows.
When the input terminal is used for frequency reference:
A 10-V (20 mA) input indicates a frequency reference that is 100% of the max. frequency.
When the input terminal is used for torque reference:
A 10-V (20 mA) input indicates a torque reference that is 100% of the motor’s rated torque.
When the input terminal is used for torque compensation:
A
10-V (20 mA) input indicates a torque compensation that is 100% of the motor
’
s rated torque.
Note 2. Adjust
the bias so
that the minimum signal level corresponds to the maximum frequency or
the motor’s rated torque, as follows.
When the input terminal is used for frequency reference:
A 0-V (4 mA) input indicates a frequency reference that is 100% of the max. frequency.
When the input terminal is used for torque reference:
A 0-V (4 mA) input indicates a torque reference that is 100% of the motor’s rated torque.
Advanced Operation Chapter
6