6-7
6-1-6 Startup Torque Compensation
With
open-loop vector control, a starting-torque compensation can be input to decrease the torque ref
-
erence’s rise time at startup.
This
function is ef
fective for equipment in which a starting torque is required, such as machinery with a
high friction load or cranes. Unlike flux vector control, the compensation is input only at startup.
H Starting-torque Compensation Function Settings
Parameter Display name Setting Units Default
Valid access levels
number
range setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
C4-03 F TorqCmp@start 0.0 to 200.0 0.1% 0.0 --- Advanced ---
C4-04 R TorqCmp@start –200.0 to 0.0 0.1% 0.0 --- Advanced ---
C4-05 TorqCmp Delay T 0 to 200 1 ms 10 --- Advanced ---
These parameters cannot be changed during operation.
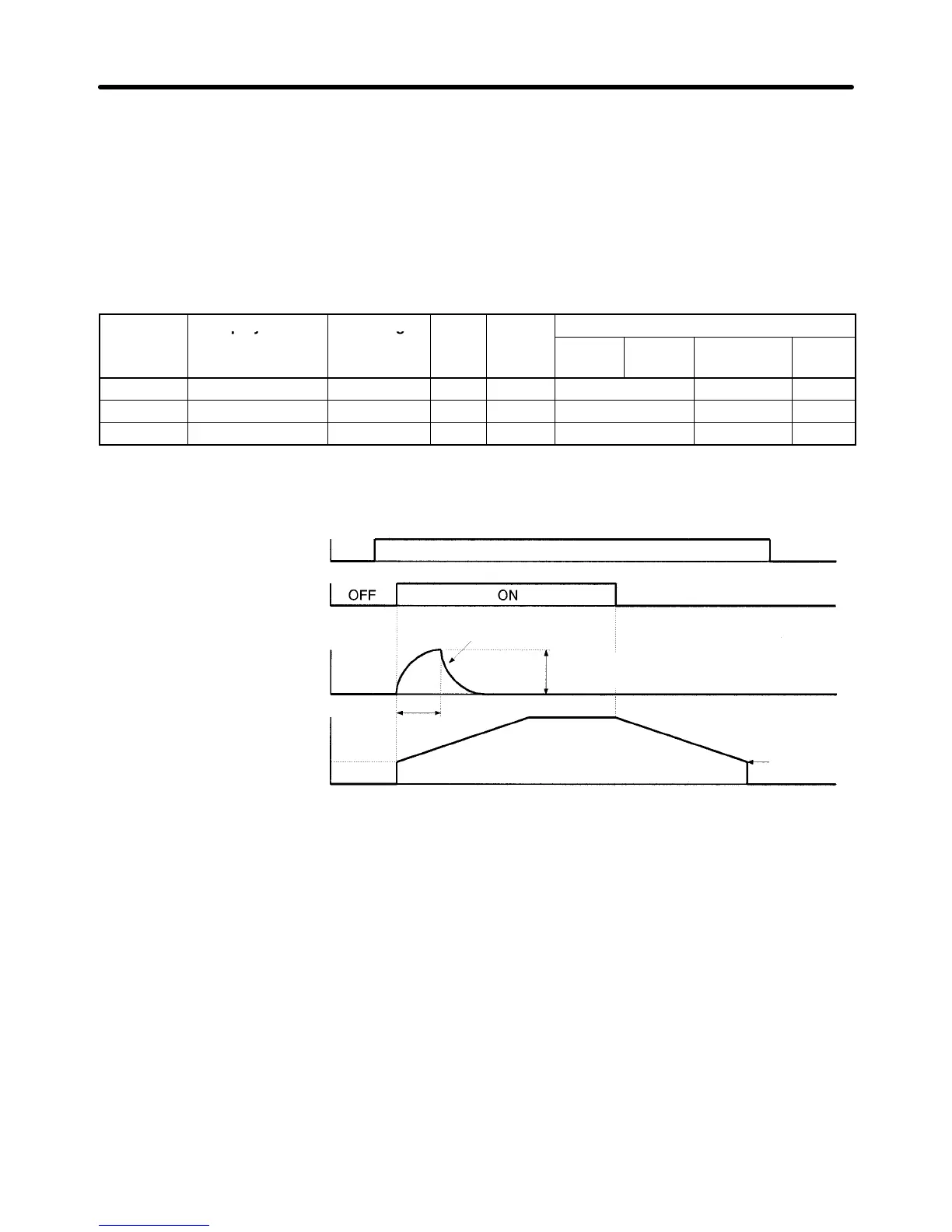
Timing Chart
Note The Inverter’s torque reference value is at its lower limit
with the torque compensation value shown above.
Frequency reference
Run command
Torque compensation value
Time constant: C4-02
C4-03 (forward)
C4-04 (reverse)
C4-05 ×
4
E1-09
Output frequency
Larger of b2-01
and E1-09
• When
using this compensation function, set the starting-torque compensation value to the friction load
in regular machinery or the lifting/lowering load for machinery such as cranes.
Friction loads:
Set the friction load in both C4-03 and C4-04.
Lifting/lowering load:
Set
the electrically driven (winding) load only
. (When the lifting machinery is equipped with a coun
-
terweight,
a shock may be generated if there is a regenerative load so do not use this function.)
• It
is
only possible to set the electrically driven compensation in both forward and reverse. (The regen
-
erative setting cannot be made.)
• The
starting-torque compensation is not
applied when switching between forward and reverse or after
a speed search.
• The starting-torque compensation is usually not applied when using a second motor.
Advanced Operation Chapter
6