6-64
6-5-4 Reference Parameters (d)
H Setting the Frequency Reference Function (d2)
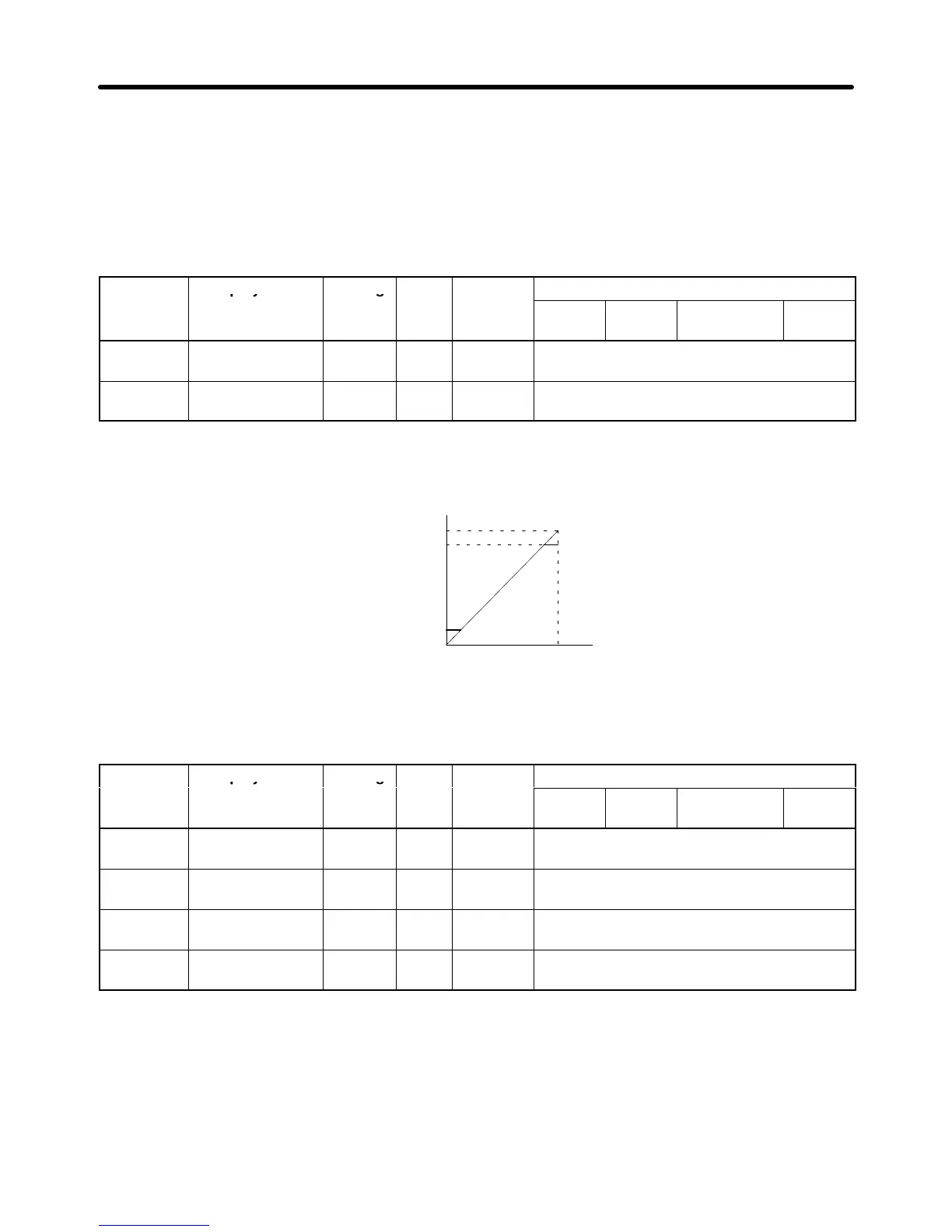
The frequency reference function sets the output frequency upper and lower limits.
When
the frequency reference is zero and a run command is input, the motor operates at the frequency
reference
lower limit (d2-02). The motor will not operate, however
, if the
lower limit is set lower than the
minimum output frequency (E1-09).
Parameter Display name Setting Units Default
Valid access levels
number
range setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
d2-01 Ref Upper Limit 0.0 to
110.0
% 100.0 Basic or Advanced
d2-02 Ref Lower Limit 0.0 to
109.0
% 0.0 Basic or Advanced
These parameters cannot be changed during operation.
Note The
frequency reference upper and lower limits are set as a percentage of the maximum output
frequency (E1-04), in increments of 1%.
Internal frequency reference
Frequency reference upper limit (d2-01)
Frequency reference lower limit (d2-02)
Set frequency reference
H Setting Prohibiting Frequency (Jump Frequencies) (d3)
This
function allows the prohibition or “jumping” of certain frequencies within the Inverter
’
s output fre
-
quency
range so that the motor can operate without resonant vibrations caused by some machine sys
-
tems. It is also used for deadband control.
Parameter Display name Setting Units Default
Valid access levels
number
range setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
d3-01 Jump Freq 1 0.0 to
400.0
Hz 0.0 Basic or Advanced
d3-02 Jump Freq 2 0.0 to
400.0
Hz 0.0 Basic or Advanced
d3-03 Jump Freq 3 0.0 to
400.0
Hz 0.0 Basic or Advanced
d3-04 Jump Bandwidth 0.0 to
20.0
Hz 1.0 Basic or Advanced
These parameters cannot be changed during operation.
To disable this function, set the jump frequency references (d3-01 to d3-03) to 0.0 Hz.
For d3-01 to d3-03, set the center values of the frequencies to be jumped.
For
d3-04, set the jump frequency bandwidth. The jump frequency
±
the jump bandwidth becomes the
jump frequency range.
Operation
is prohibited within the jump frequency range, but
changes during acceleration and decelera
-
tion are smooth with no jumps.
Advanced Operation Chapter
6