Select a suitable control mode
Control mode U/f control with linear or square-law characteristic
Flux current control (FCC)
Encoderless vector control
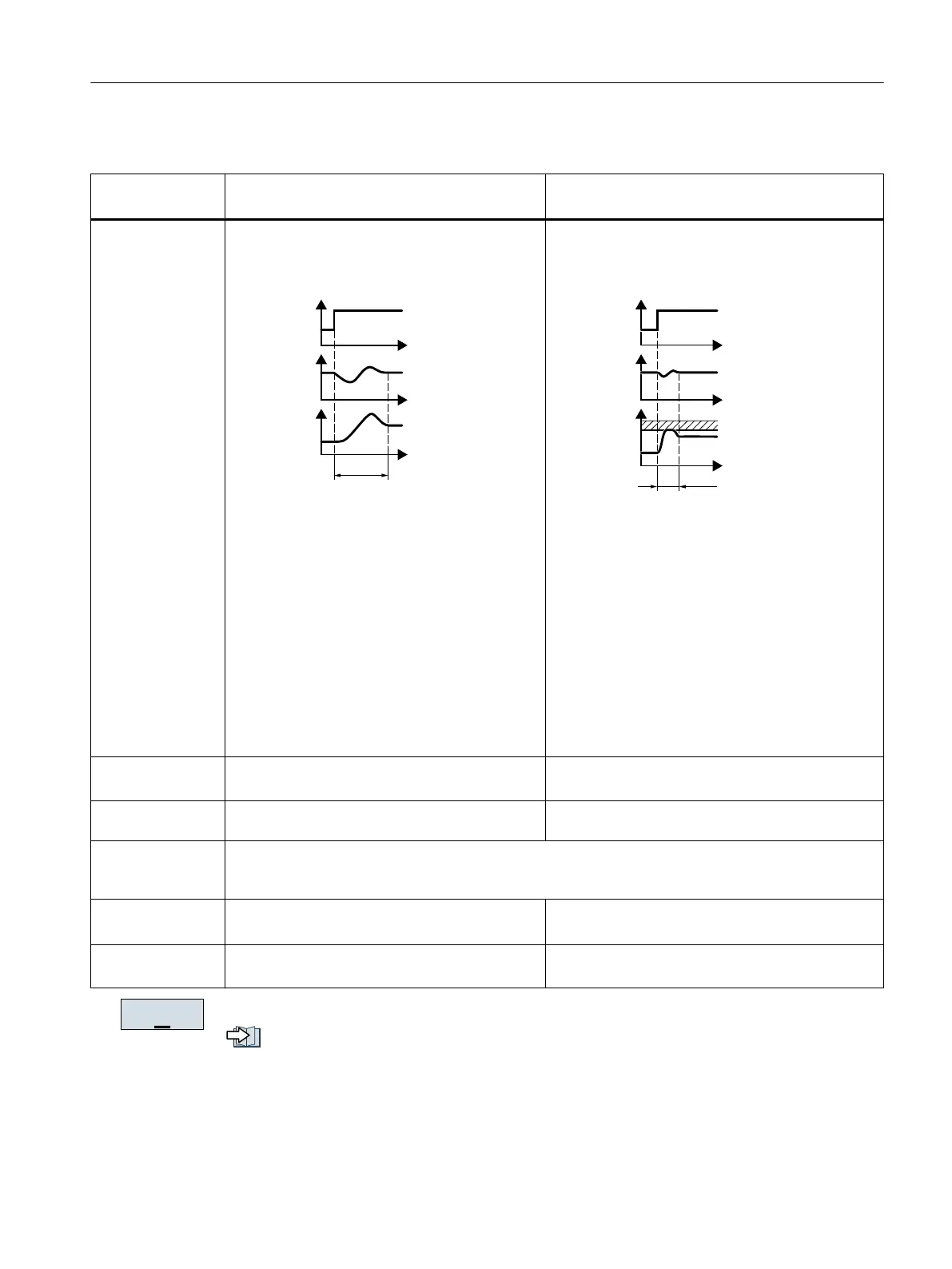
Closed-loop con‐
trol characteristics
● Typical settling time after a speed change:
100 ms … 200 ms
● Typical settling time after a load surge: 500 ms
6SHHG
/RDG
0RWRU
WRUTXH
W
W
W
PV
● The control mode is suitable to address the
following requirements:
– Motor power ratings < 45 kW
– Ramp-up time 0 → rated speed
(depending on the motor power rating):
1 s (0.1 kW) … 10 s (45 kW)
– Applications with increasing load torque
without load surges
● The control mode is insensitive with respect
to imprecise setting of the motor data
● Typical settling time after a speed change:
< 100 ms
● Typical settling time after a load surge: 200 ms
6SHHG
/RDG
0RWRU
WRUTXH
W
W
PV
● The vector control controls and limits the motor
torque
● Torque accuracy that can be achieved: ± 5% for
15 % … 100 % of the rated speed
● We recommend vector control for the following
applications:
– Motor power ratings > 11 kW
– For load surges 10 % … >100 % of the rated
motor torque
● The vector control is necessary for a ramp-up
time 0 → Rated speed (dependent on the rated
motor power): < 1 s (0.1 kW) … < 10 s (250 kW).
Application exam‐
ples
● Pumps, fans, and compressors with flow
characteristic
● Pumps and compressors with displacement
machines
Motors that can be
operated
Induction motors Induction, synchronous and reluctance motors
Power Modules
that can be operat‐
ed
No restrictions
Max. output fre‐
quency
550 Hz 240 Hz
150 Hz with PM330 Power Module
Commissioning
● Contrary to vector control, no speed controller
has to be set
Select the default setting for the interfaces of the inverter that is suitable for your application.
Default setting of the interfaces (Page 115)
Commissioning
5.4 Quick commissioning using the BOP-2 operator panel
Converter with the CU230P-2 Control Units
Operating Instructions, 09/2017, FW V4.7 SP9, A5E34257946B AE 169

 Loading...
Loading...

























