6 Pro
rammin
the control
6
03/2006
6.10 Linear motors (1FN1 and 1FN3 motors)
6-132
© Siemens AG 2006 All Rights Reserved
SINUMERIK 840D/810D Start-Up Guide (IADC) – 03/2006 Edition
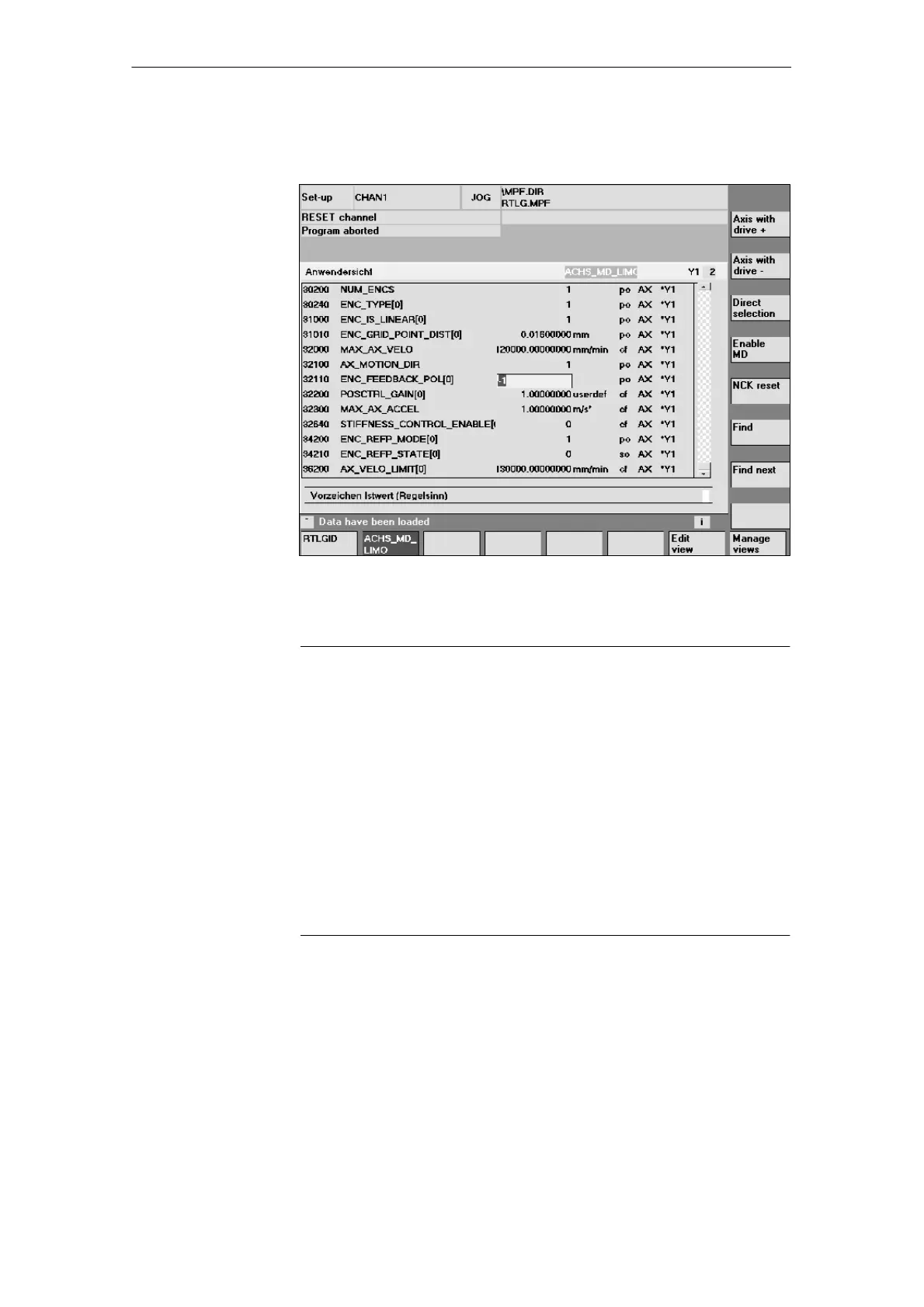
2. Adapt the axis-specific machine data (MD) as for feed drive
Fig. 6-25 Minimum selection of axis machine data for linear motor
Please observe the following safety information:
Note
You must check the following before activating the pulse and servo enables:
S Ensure that the encoder parameters are correct, especially if it is necessary
to invert the actual speed or velocity value.
Check that the actual speed or velocity value has the correct sign and that
the actual position value counts up or down correctly by pushing the motor
manually.
Note that the speed inversion should also be programmed on the NCK side
(axis-specific data, MD 32110 – ENC_FEEDBACK_POL[0] = –1).
S When performing initial trials with rotor position identification based on a
moving system, it is advisable to reduce the current for safety reasons, e.g.
to 10% (MD 1105 = 10%). The current reduction does not take effect until
the identification is effective.

 Loading...
Loading...







