1.5.4.1.2 General specifications
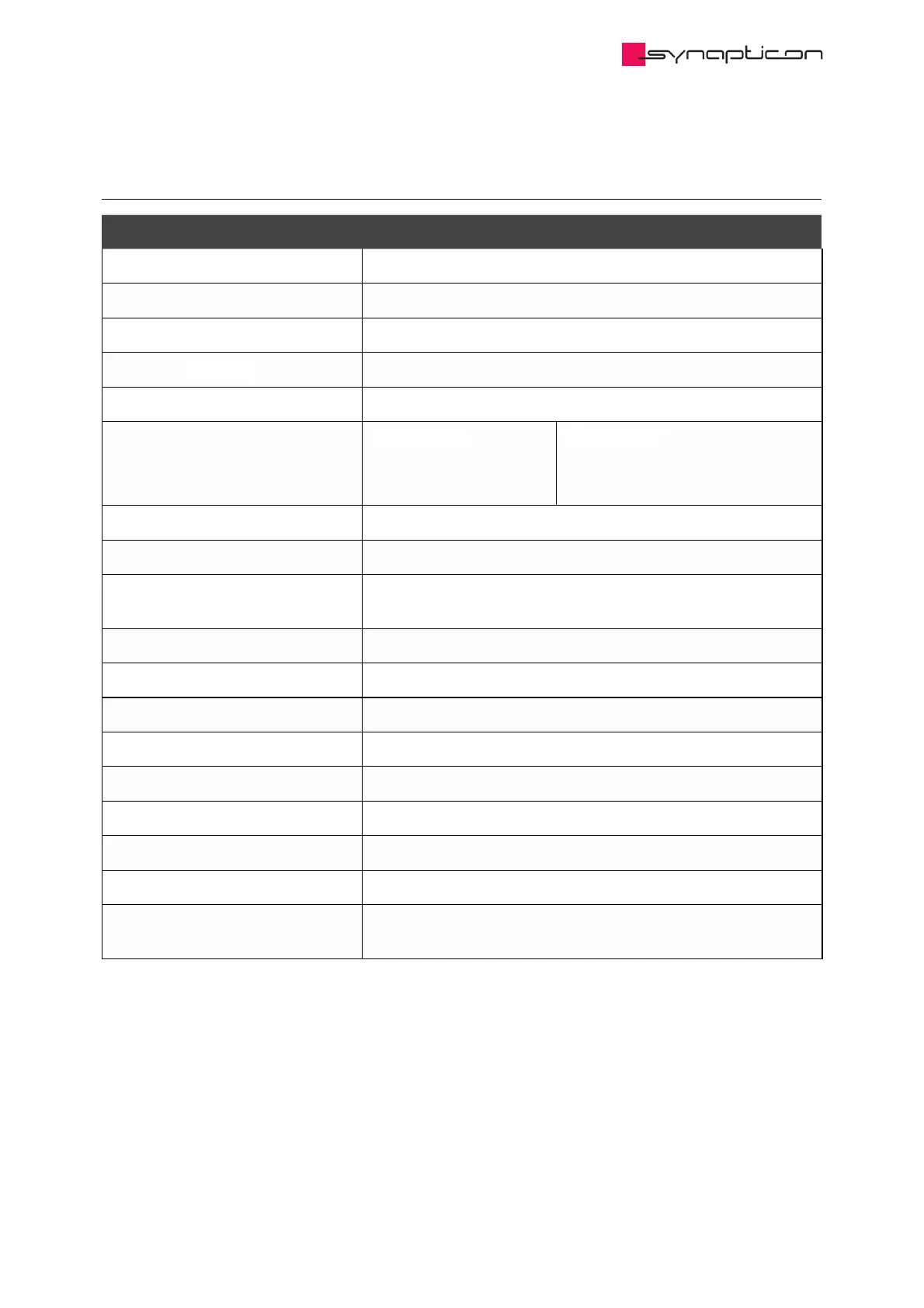
General specifications
Supported Communication Standard EtherCAT
Number of Phases 4
Number of Analog Inputs * 4
Number of Digital IOs ** 6 × GPIO / SPI*** / I C***
Number of Encoder Connectors 2 ports
Supported Encoder Types Encoder Port 1
ABI, ABZ (RS422/TTL****),
HALL
Encoder Port 2
ABI, ABZ (RS422/TTL****), HALL, BiSS-
C, SSI***
Motor Configurations 1 BLDC-Motor and 1 active brake
2 DC-Motors*****
1 DC-Motor*****, 1 active brake and 1 additional phase for
external actuation
Brake control voltage 0-48 V PWM Phase D
More functions Integrated Shunt Circuitry******
Dimensions 70 x 40 x 22 mm
Weight 80 g
Operating temperature 0 to 50 °C
Max. installation altitude 2000 m
Storage Temperature -35 to 85 °C
Humidity 5-85% rH
Sensors on-board DC-BUS Voltage, DC-BUS current, Phase Voltage, Phase current
(two phases measured, one computed), Temperature
Notes:
* 4 single ended 0-5 V analog Inputs are supported. (Extendable to 0-10 V by request)
** 3.3 V CMOS logic
*** Upon Request.. rst-class:: widtch100percent
**** To use ABI/ABZ with TTL please ensure that your Encoder is capable to sink 5 mA to GND when the
output of the encoder is 0
2