3.1.8.1.3.1.1 Parameters
0x2010 Torque Controller Values Kp, Ki and Kd for Torque Controller
0x2012 Position Controller Values Kp, Ki and Kd for Cascaded Position Controller (Both loops: Position
and Velocity)
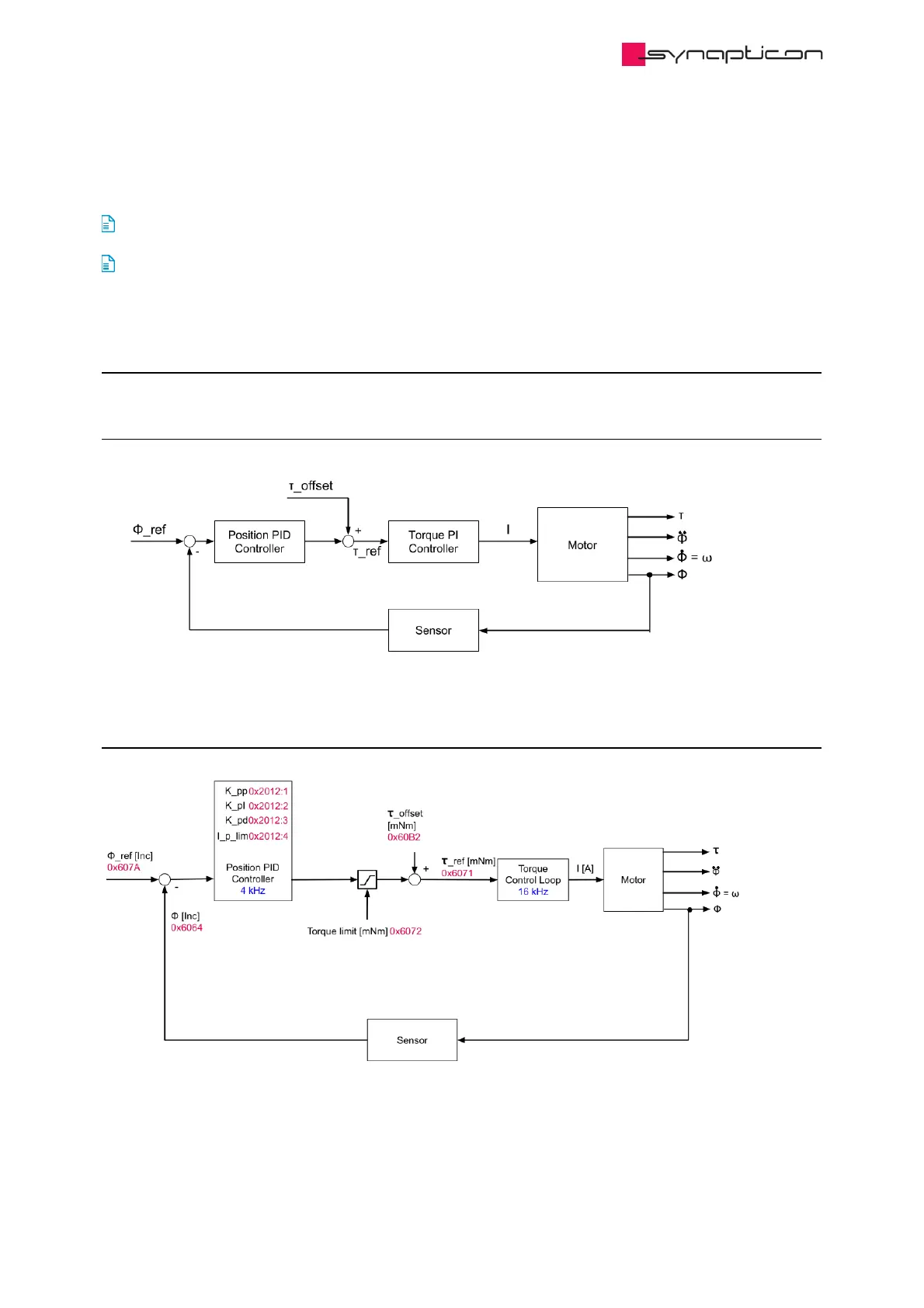
3.1.8.1.3.2 Simple PID Controller
General View
Detail View
The cascaded PID controller is generally preferable over the simple PID controller. It is activated by default
and apart from academic purposes there are few reasons to switch to the simple PID controller. However,