3.1.8.3.4 Gain Scheduling
Depending on the application, the “optimal” tuning for the cascaded PID controller may differ between
different operating points. If there is only one tuning available, it has to be a compromise not using the full
potential of the hardware.
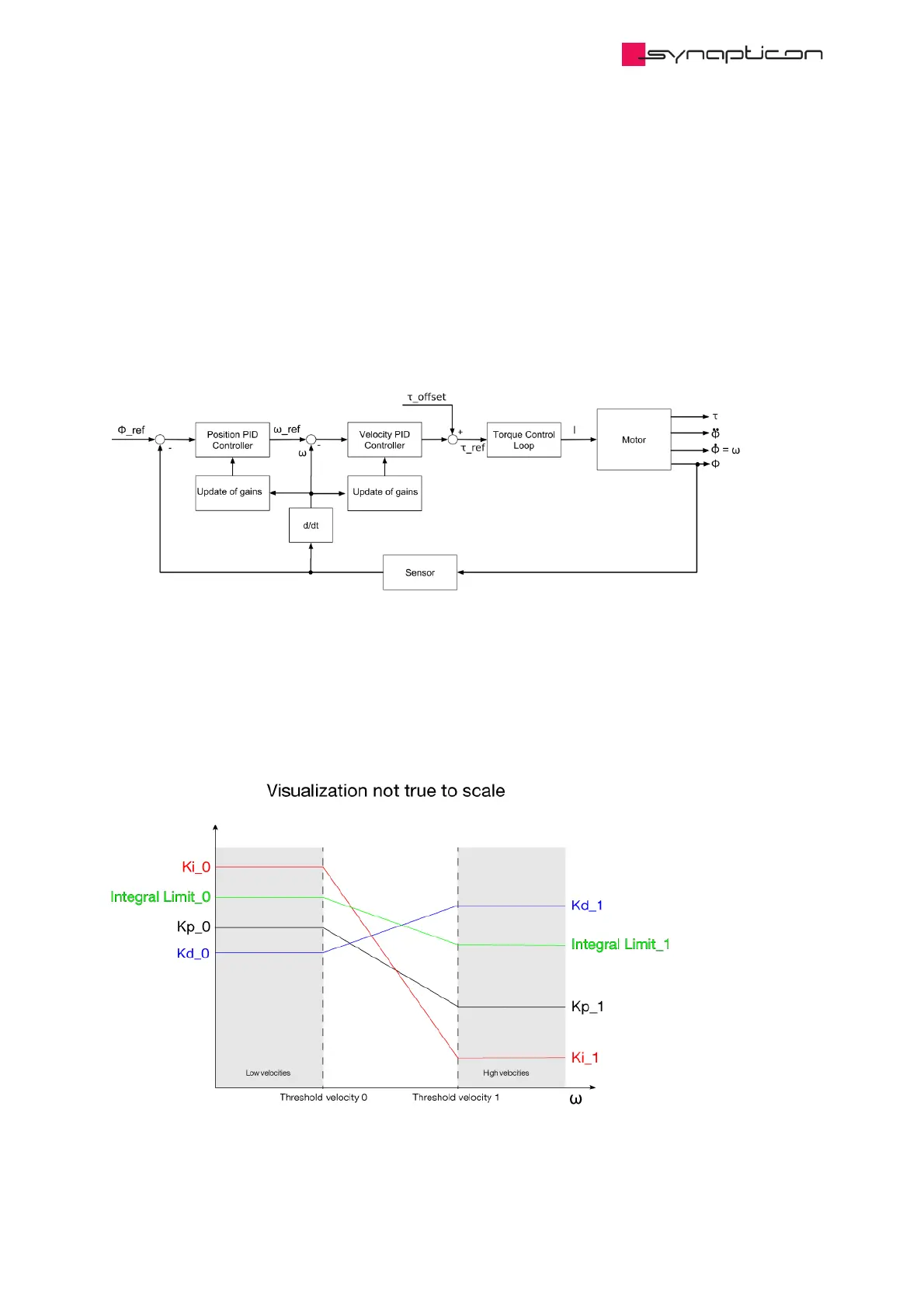
This feature allows the user to apply controller gains which will change dynamically regarding the current
speed. This technique can be used within the cascaded position controller to compensate for nonlinear
effects, especially stiction / friction in the mechanics.
For velocities (in rpm) below a user-defined value, a set of PID values determined best for slow motion is
used. Likewise, for velocities (in rpm) above a user-defined value, a set of PID values determined best for fast
motion is used.
The PID values between these values are interpolated linearly.