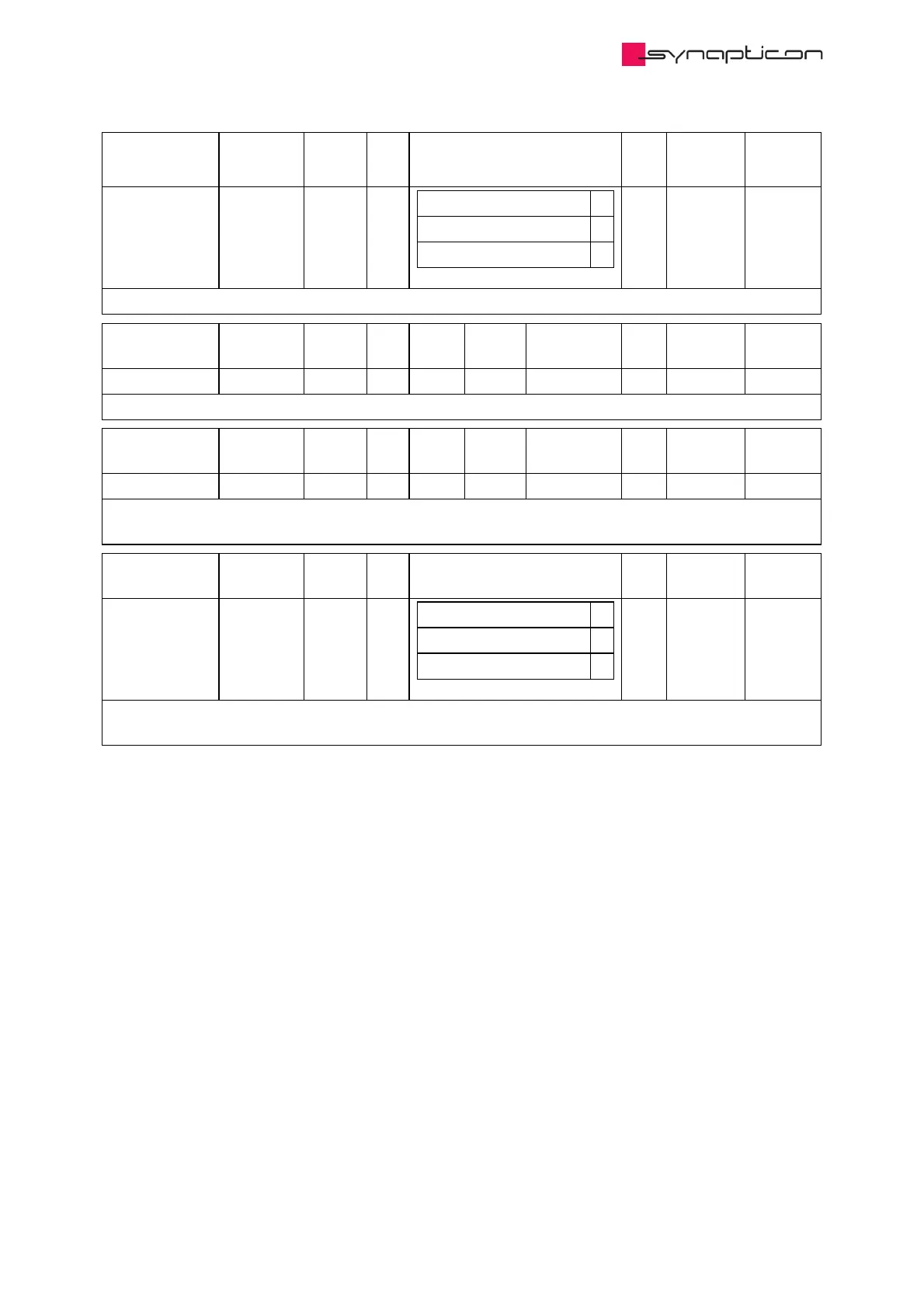
Name Index:Sub Type Bit
Size
Options Unit Access PDO
Mapping
Switching
frequency
0x2010:9 USINT 8
16 kHz 0
32 kHz 1
64 kHz 2
readwrite
Select the switching frequency for the 3 motor phases (A, B, C).
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Settling time 0x2010:10 UINT 16 100 10000 2000 μs readwrite
Settling time of current loop controllers. This value should be entered in [micro seconds]
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Damping ratio 0x2010:11 UINT 16 100 10000 2000 readwrite
Damping ratio of current loop controllers. This value should be entered in [per mill]. As an example, if a
damping ratio of 1.5 is required, then this value should be set to 1500.
Name Index:Sub Type Bit
Size
Options Unit Access PDO
Mapping
Encoder source 0x2010:12 USINT 8
No encoder 0
Encoder 1 1
Encoder 2 2
readwrite
Select which encoder should be used for torque control. Must be mounted to the motor shaft. Used for
commutation.