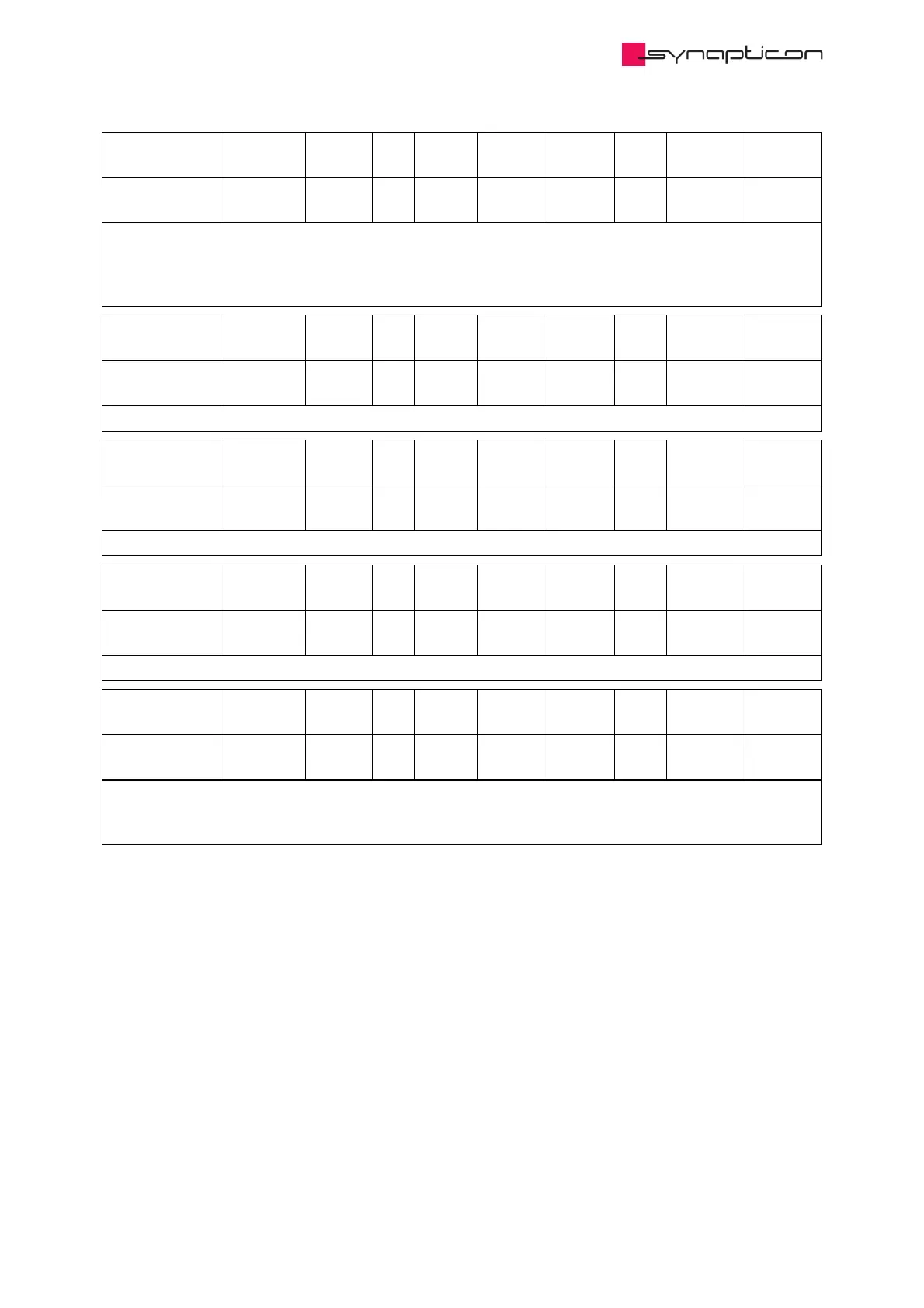
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Position loop
integral limit 1
0x2013:15 UDINT 32 0 0 rpm readwrite
The integrator limit of the Position Control Loop of area 1 (high velocity, above threshold velocity 1).
Technique used for preventing the windup is clamping and it prevents the integral term from
accumulating above or below pre-determined bounds. Limit should always be set in the driving shaft units,
especially important, when the gear box is used in the setup.
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Velocity loop
Kp 1
0x2013:16 REAL 32 0 65535 0 readwrite
The P-gain of the Velocity Control Loop of area 1 (high velocity, above threshold velocity 1) [mNm/rpm]
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Velocity loop Ki
1
0x2013:17 REAL 32 0 65535 0 readwrite
The I-gain of the Velocity Control Loop of area 1 (high velocity, above threshold velocity 1) [mNm/(rpm*s)]
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Velocity loop
Kd 1
0x2013:18 REAL 32 0 65535 0 readwrite
The D-gain of the Velocity Control Loop of area 1 (high velocity, above threshold velocity 1) [rpm*s/inc]
Name Index:Sub Type Bit
Size
Min
Data
Max
Data
Default
Data
Unit Access PDO
Mapping
Velocity loop
integral limit 1
0x2013:19 UDINT 32 0 0 mNm readwrite
The integrator limit of the Velocity Control Loop of area 1 (high velocity, above threshold velocity 1).
Technique used for preventing the windup is clamping and it prevents the integral term from
accumulating above or below pre-determined bounds.