216 Parameters
10.07 DC MAGN TIME
Defines the constant DC magnetising time. After the
start command, the drive automatically
premagnetises the motor at the set time.
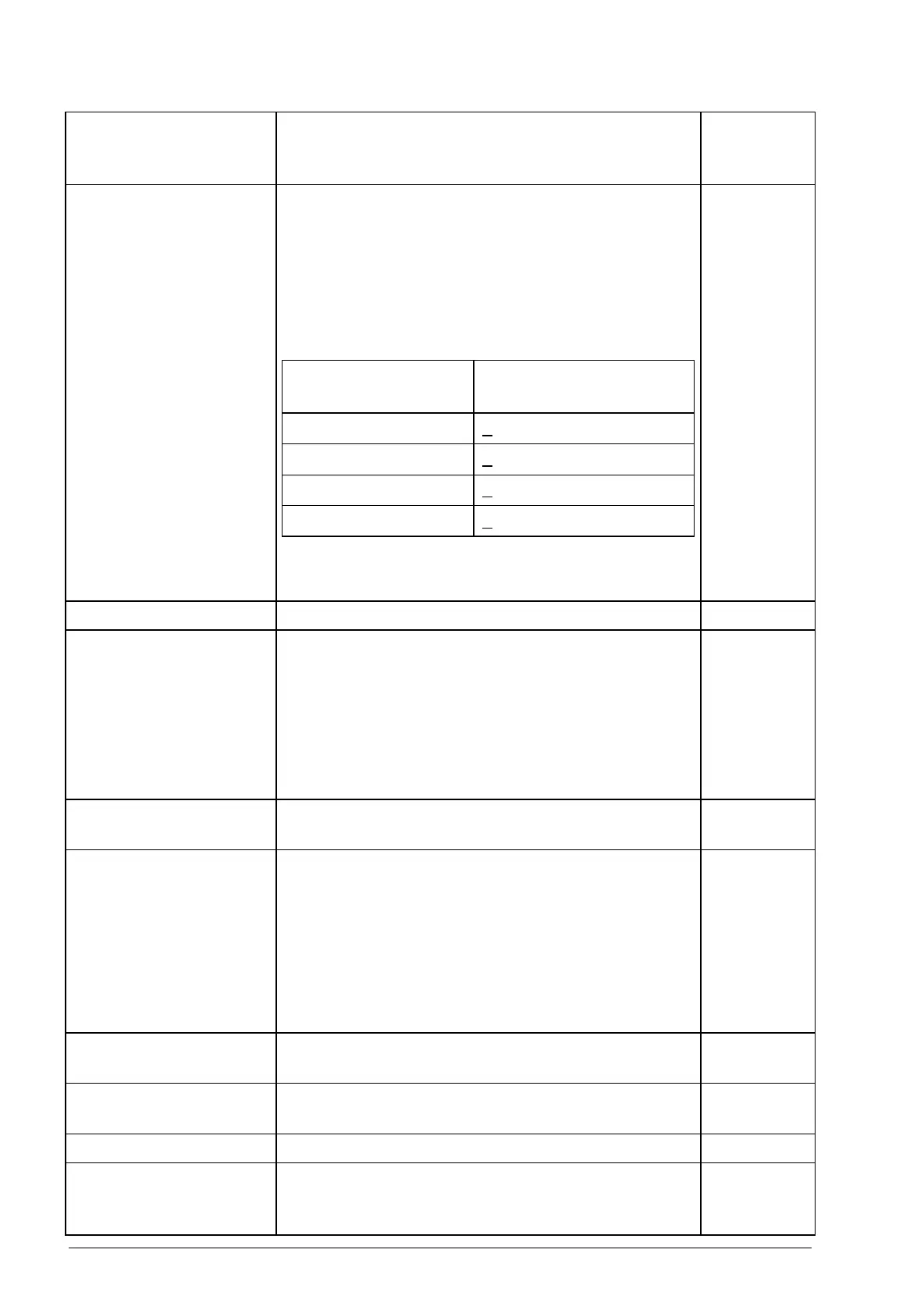
To make sure that motor is magnetised fully, this
value can be set to the same value as or higher than
the rotor time constant. If value is not known, use the
rule-of-thumb value given in the table below:
Note: This parameter cannot be changed while the
drive is running.
500 ms/
Real
0…10000 ms DC magnetising time. 1 = 1 ms
10.80 LIFT RUN ENABLE
Selects the source for the Run enable signal.
1 = Run enable
When the Run enable signals is switched Off, the
drive will not start, or if the drive is running, it will
stop.
Note: This parameter cannot be changed while the
drive is running.
C.TRUE /
Bit pointer
Bit pointer: CONST or POINTER (See Terms and
abbreviations on page 183.)
10.81 EVACUATION
MODE
Selects the source for enabling/disabling the
evacuation mode.
1 = Evacuation mode is enabled.
0 = Evacuation mode is disabled.
The evacuation mode is used for a lift car rescue
operation in case the power supply fails. For more
information, see section Rescue operation on
page 173.
C.FALSE/
Bit pointer
Bit pointer: CONST or POINTER (See Terms and
abbreviations on page 183.)
10.82 EVACUATION
AUTO
Selects the manual or automatic evacuation mode. DISABLED/
enum
DISABLED
Manual evacuation mode is enabled. 0
AUTOMATIC
Automatic evacuation mode is enabled. In this mode
drive measures the direction of the lighter load and
selects the evacuation direction accordingly.
1
No. Bit/Name/Value/
Range
Description Def/Type
FbEq
(16b/32b)
Motor rated power Constant magnetising
time
< 1 kW > 50 to 100 ms
1 to 10 kW >
100 to 200 ms
10 to 200 kW >
200 to 1000 ms
200 to 1000 kW >
1000 to 2000 ms