4. Operation
4.2 Operation in Positioner Mode
4-20
ME0342-4B
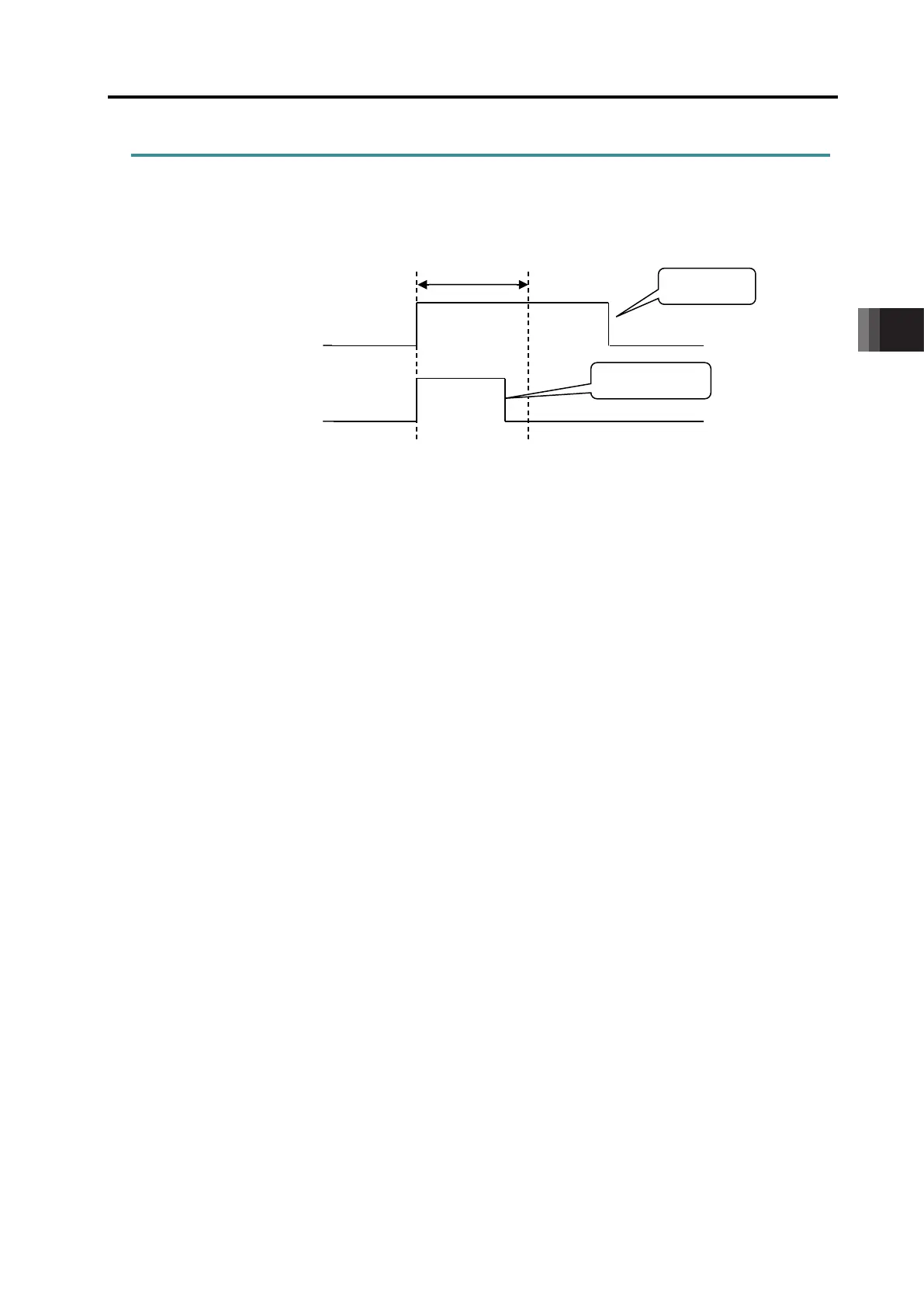
(14) Stop mode :
Automatic servo OFF is enabled after a certain period from the completion of positioning
for power saving.
Time setting should be conducted in the parameters and it can be selected from three
types.
Setting Operation after completion of operation parameter No.
0 Servo ON not changed
1 Automatic servo OFF after certain period 36
2 Automatic servo OFF after certain period 37
3 Automatic servo OFF after certain period 38
4 Full servo control
5
Full-servo control for a certain time and then
automatically turning servo OFF
36
6
Full-servo control for a certain time and then
automatically turning servo OFF
37
7
Full-servo control for a certain time and then
automatically turning servo OFF
38
Caution
● No retaining torque is provided in automatic servo OFF. Pay sufficient attention to the
setting because the actuator may be moved by external force applied to it.
● Do not use the automatic servo OFF if the next moving command is relative distance
specification (pitch feed). Failure to follow it may cause position shift to occur.
● Do not use the automatic servo OFF in pressing. If used, the pressing force is lost.
● Automatic Servo OFF would not function in the operation with teaching mode of PC
software.
● The stop mode set in the position table would not be activated if conducting only servo-
ON and not conducted positioning even for once to the position.
Refer to [5.2 Power-Saving Function] for the details.
● For the pulse motors other than high-resolution encoder, positioning should complete
once the encoder value reaches ±4 counts of the target position.
If higher accuracy is required for positioning, activate the full servo function.
Refer to [5.2.1 Automatic Servo-off and Full Servo Functions] for the details.

 Loading...
Loading...






