4. Operation
4.3 Pulse Train Control Mode
4-124 ME0342-4B
4.3.5 Parameter Settings Required for Advanced Operations
Depending on systems and/or loads, set the following parameters if necessary.
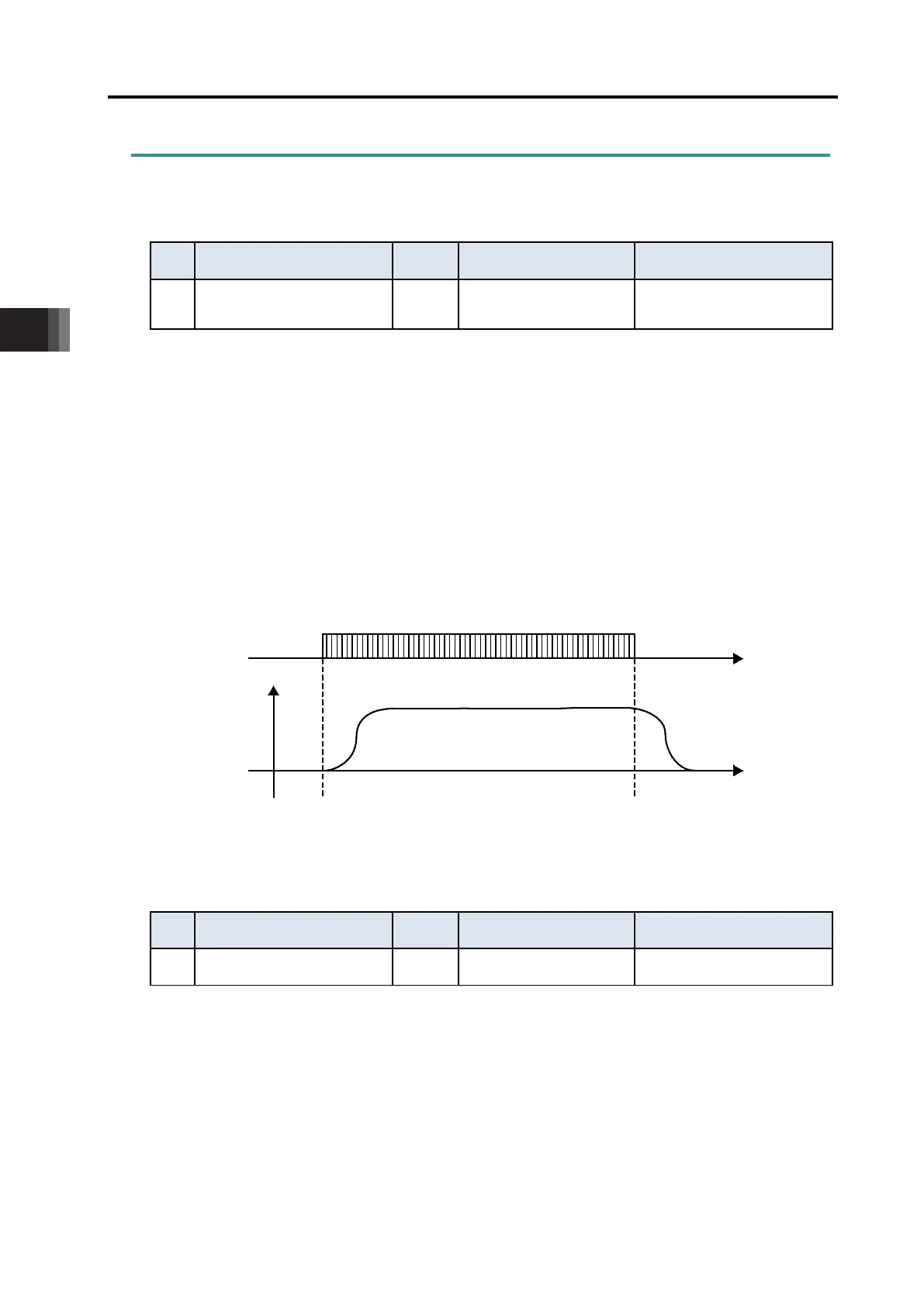
[1] Position Command Primary Filter Time Constant
No. Name Unit Input Range Default factory setting
55
Position command primary
filter time constant
ms 0.0 to 100.0 0.0
The acceleration/deceleration of the actuator can be set in S-shaped curve with this parameter
setting. (It is not the S-shaped acceleration/deceleration function.)
If command pulse train is input at a certain frequency, the actuator is accelerated/decelerated
slowly depending on the time constant.
The actuator moves by the number of command pulses.
Even if the host controller (PLC etc.) has no acceleration/deceleration function or the frequency
of command pulses varies rapidly, the actuator can be accelerated/decelerated smoothly.
The delay in positioning stabilizing time requires approximately 3 times longer than the set value
after the command pulse input stop. If the set value is 100ms, the stabilizing time would be
approximately 300ms.
[2] Torque Limit
No. Name Unit Input Range Default factory setting
57
Torque Limit
% 0 to 70 70
Set a desired torque limit used in the torque limit input signal (TL), which is an external input
signal.
Set a desired torque as a percent [%] of the rated thrust representing 100% (the rated thrust is
specified in the catalog).
When the external torque-limit input signal (TL) turns ON, the torque will be limited according to
the setting.
Once the torque current reaches a level corresponding to the specified torque limit, the torque
limiting signal (TLR) will be output as an external output signal.

 Loading...
Loading...






