4. Operation
4.3 Pulse Train Control Mode
4-122
ME0342-4B
Caution
● Do not set the minimum movement unit out of the encoder resolution ability. If this
setting is conducted, the actuator would not start moving until enough command pulse
is stored in the encoder resolution error.
Caution
● Pay attention not to exceed the specification limit when setting the velocity, acceleration
and deceleration.
● The pressing operation velocity should be set to the rated pressing velocity described in
[9.4 List of Specifications of Connectable Actuators] when it is to conduct the pressing
operation.
Encoder resolution for linear axis [mm/pulse]
Ball Screw Lead Length [mm/rev]
No. of Encoder Pluses [pulse/rev]
No. of Encoder Pluses [pulse/rev]
4.3 Pulse Train Control Mode
ME0342-4B 4-123
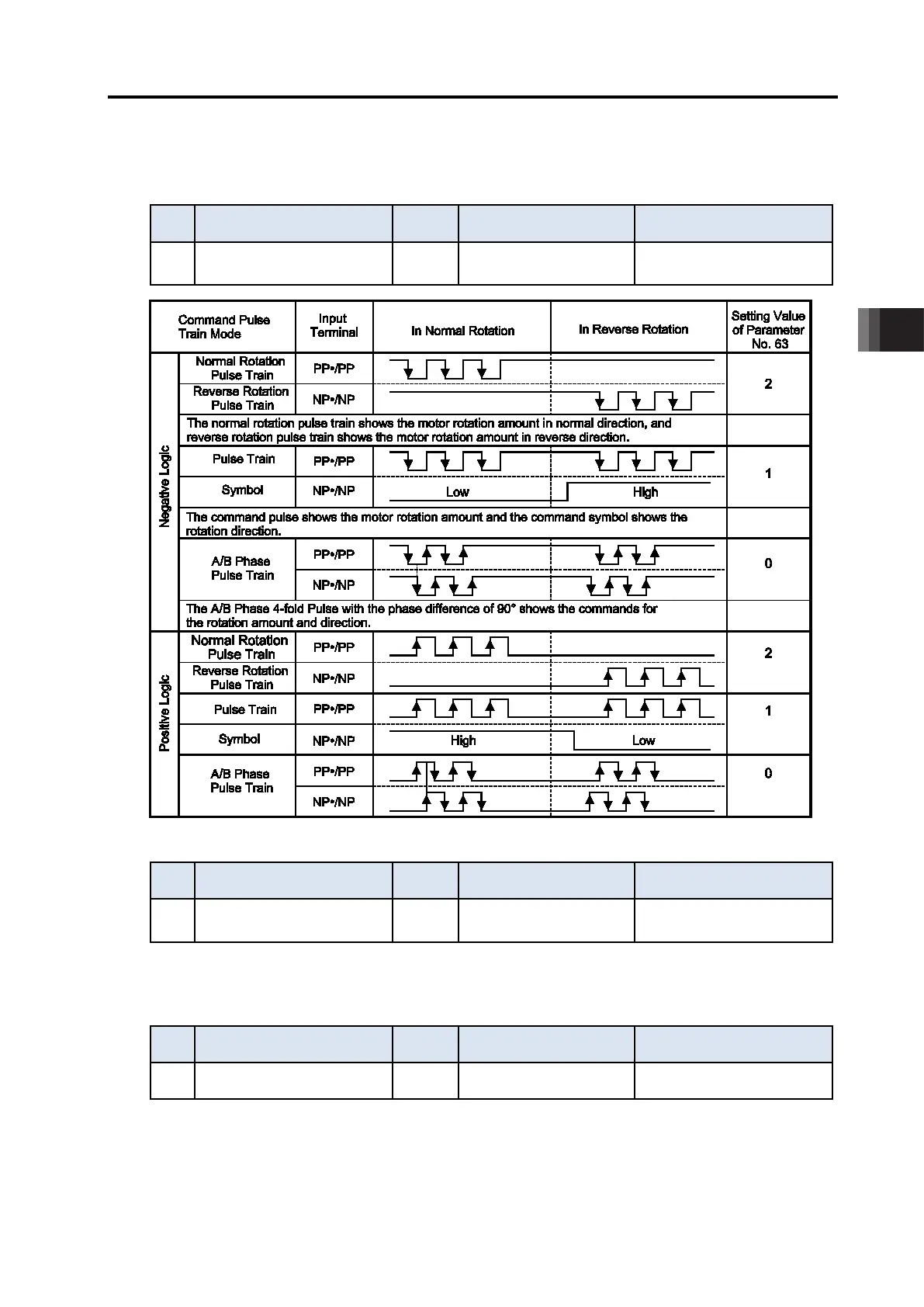
[2] Format Settings of Command Pulse Train
Set the format of command pulse train in Parameter No.63 and active high/low in No.64.
(1) Command Pulse Mode
No. Name Unit Input Range Default factory setting
63
− 0 to 2 1
(2) Command Pulse Mode Input Polarity
No. Name Unit Input Range Default factory setting
64
Command Pulse Input
Mode Polarity
−
0: Positive logic
1: Negative logic
0
[3] Pulse Train Datum Position (Parameter No. 167)
No. Name Unit Input Range Default factory setting
167
Pulse Train Datum Position
mm -9,999.99 to 9,999.99 0
In the condition of the Pulse Train Contorol Mode (PIO pattern 7 selected), an operation is made
with the position at the this parameter set as the datum position. It is used to Pulse
Train Control for the absolute type actuator.

 Loading...
Loading...






