6. Parameter
6.1 Parameter
6-1
ME0342-4B
6.1 Parameter
Parameters are the data to set up considering the system and application.
When a change is required to the parameters, make sure to back up the data before the change
so the settings can be returned anytime.
With using PC software, it is able to store the backup to the PC. Teaching pendant is able to
store the back up to the memory card.
Also, for the purpose of rapid recovery after the investigation of failure unit or replacing the
controller, keep data backup or memo also after the parameter change.
The change to the parameters will be activated after they are edited, written to the flash FeRAM,
then either software reset or reboot of the power. It will not be active only with writing on the
teaching tool.
Warning
● Parameter setting has great influences on operations of the controller. Incorrect
parameter setting may not only cause malfunction or failure of the controller to occur
but also people and assets to be exposed to risk.
● The controller is configured to be applicable to normal operation at shipment. Before
providing certain change or setting for the controller to be fit to your system,
understand the control methods of the controller sufficiently. Please contact us if you
have anything unclear.
● Do not turn OFF the power to the controller during the parameter writing.
6.1 Parameter
ME0342-4B 6-2
6.1.1 Parameter List
The categories in the table below indicate whether parameters should be set or not. There are
five categories as follows:
A : Check the settings before use.
B : Use parameters of this category depending on their uses.
C : Use parameters of this category with the settings at shipments leaving unchanged as a
rule. Normally they may not be set.
D : Parameters of the category are set at shipment in accordance with the specification of the
actuator. Normally they may not be set.
E : Parameters of the category are exclusively used by us for convenience of production.
Changing their settings may not only cause the actuator to operate improperly but also to
be damaged. So, never change the setting of the parameters.
Category do not appear on the teaching tool.
Also, the unused parameter numbers are not mentioned in the list.
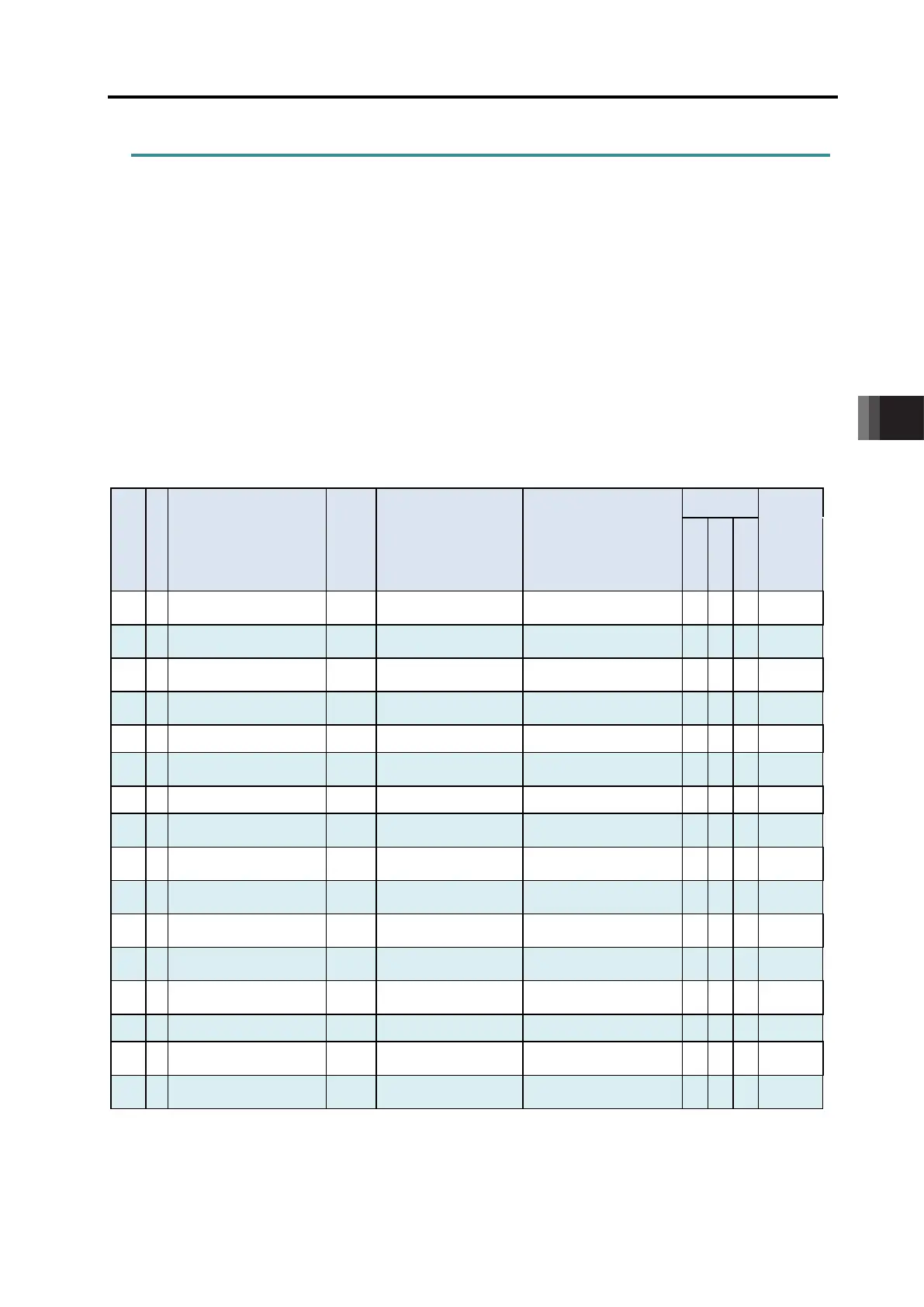
Parameter List (1/5)
No.
Name
Unit
(Note 1)
Input Range Default factory setting
Compatible
controller type
(Note 3)
Relevant
sections
Positioner
Pulse Train
Pulse Press
1 B Zone Boundary 1+
-9,999.99 to 9,999.99 Actual stroke on + side
(Note2)
○ ○ ○ 6.1.2 [1]
2 B Zone Boundary 1-
-9,999.99 to 9,999.99 Actual stroke on - side
(Note2)
○ ○ ○ 6.1.2 [1]
3 A Soft limit+
-9,999.99 to 9,999.99 Actual stroke on + side
(Note2)
○ ○ ○ 6.1.2 [2]
4 A Soft limit-
-9,999.99 to 9,999.99 Actual stroke on - side
(Note2)
○ ○ ○ 6.1.2 [2]
5 D Home return direction - 0: Reverse, 1: Normal
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [3]
6 C
Press & hold stop judgment
period
ms 0 to 9,999
In accordance with actuator
(Note2)
○ - ○ 6.1.2 [4]
7 C Servo gain number - 0 to 31
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [5]
8 B Default velocity
1 to Actuator’s
max. speed
Rated actuator speed
(Note2)
○ - ○ 6.1.2 [6]
9 B
Default
acceleration/deceleration
G
0.01 to actuator's max.
acceleration/ deceleration
Rated actuator's acceleration
/deceleration
(Note2)
○ - ○ 6.1.2 [7]
10 B Default positioning width
0.01 to 999.99
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [8]
12 B
Current-limiting value at
standstill during positioning
% 0 to 70
In accordance with actuator
(Note2)
○ ○ - 6.1.2 [9]
13 C
Current-limiting value
during home return
% 0 to 100
In accordance with actuator
(Note2)
○ ○ - 6.1.2 [10]
15 B
Select enable/disable
pause input
- 0: Enabling, 1: Disabling 0
○ - ○ 6.1.2 [11]
16 B SIO communication speed bps 9,600 to 230,400 38,400
○ - ○ 6.1.2 [12]
17 B
Minimum delay time for
slave transmitter activation
ms 0 to 255 5
○ - ○ 6.1.2 [13]
18 E
Home position check
sensor input polarity
0 to 2
In accordance with actuator
(Note2)
○ ○ - 6.1.2 [14]
Note 1 The unit (deg) is for rotary actuator and lever type gripper. It is displayed in mm in the teaching tools.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipment, the parameters are set in
accordance with the specification.
Note 3 Positioner: for Positioner Mode, Pulse Train: for Pulse Train Mode, Pulse Press: for Pulse Press Train Control (PCON-CBP)

 Loading...
Loading...






