6. Parameter
6.1 Parameter
6-3 ME0342-4B
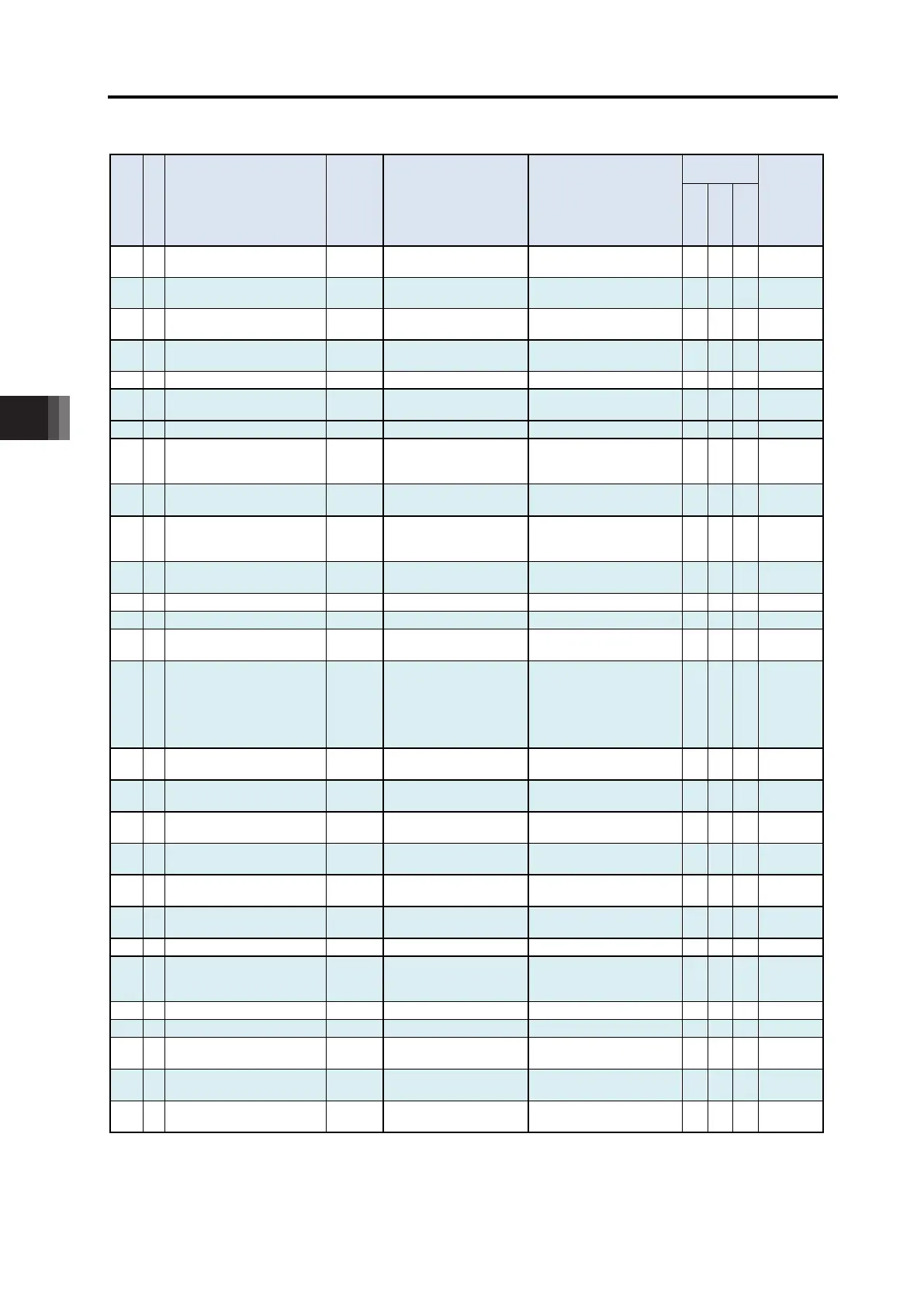
Parameter List (2/5)
No.
Name
Unit
(Note 1)
Input Range Default factory setting
Compatible
controller type
(Note 3)
Relevant
sections
Pulse Train
Positioner
Pulse Train
21 B
Select enable/disable servo
ON input
- 0: Enabling, 1: Disabling
0
○ ○ ○ 6.1.2 [15]
22 C Home return offset level
0.00 to 9,999.99
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [16]
23 B Zone Boundary 2+
-9,999.99 to 9,999.99 Actual stroke on + side
(Note2)
○ ○ ○
24 B Zone Boundary 2-
-9,999.99 to 9,999.99 Actual stroke on - side
(Note2)
○ ○ ○
26 B PIO jog velocity
1 to Actuator’s
max. speed
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [19]
28 B
Default movement direction
for excitation-phase signal
- 0: Reverse, 1: Normal
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [21]
29 B
Excitation-phase signal
detection time
ms 1 to 999 10
○ - ○ 6.1.2 [22]
30 B Excitation Detection Type -
1: New method 1
1
○ ○ ○ 6.1.2 [23]
31 C
Velocity loop proportional
gain
- 1 to 99,999,999
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [24]
Velocity loop integral gain
In accordance with actuator
(Note2)
Torque filter time constant
In accordance with actuator
(Note2)
34 C Press velocity
1 to actuator's
max. pressing speed
In accordance with actuator
(Note2)
○ - ○ 6.1.2 [27]
35 C Safety velocity
mm/s
(deg/s)
(The maximum velocity
should be the upper limit
for the actuators with the
maximum velocity less
100
○ ○ ○ 6.1.2 [28]
36 B
Auto servo-motor OFF
delay time 1
s 0 to 9,999 0
○ - ○ 6.1.2 [29]
37 B
Auto servo-motor OFF
delay time 2
s 0 to 9,999 0
○ - ○ 6.1.2 [29]
38 B
Auto servo-motor OFF
delay time 3
s 0 to 9,999 0
○ - ○ 6.1.2 [29]
39 B
Position complete signal
output method
(Note4)
- 0: PEND, 1: INP 0
○ - ○ 6.1.2 [30]
40 C
Select enable/disable
home-return input
- 0: Enabling, 1: Disabling 0 ○ ○ ○ 6.1.2 [31]
41 C
Select enable/disable
operating-mode input
- 0: Enabling, 1: Disabling 0 ○ ○ ○ 6.1.2 [32]
0: Enabling, 1: Disabling
43 B
Home position check
sensor input polarity
-
1: a-contact
In accordance with actuator
(Note2)
○ ○ ○ 6.1.2 [34]
Silent interval magnification
47 B PIO jog velocity 2
1 to Actuator’s
max. speed
In accordance with actuator
(Note2)
○ - ○ 6.1.2 [37]
48 B PIO inch distance
0.01 to 1.00 1.00
○ - ○ 6.1.2 [38]
49 B PIO inch distance 2
0.01 to 1.00 0.10
○ - ○ 6.1.2 [38]
Note 1 The unit (deg) is for rotary actuator and lever type gripper. It is displayed in mm in the teaching tools.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipment, the parameters are set in
accordance with the specification.
Note 3 Positioner: for Positioner Mode, Pulse Train: for Pulse Train Mode, Pulse Press: for Pulse Press Train Control (PCON-CBP)
Note 4 It should be INP unconditionally when in Pulse Train Mode. (No options to select)

 Loading...
Loading...






