3. Wiring
3.2 Pulse Train Control Mode
3-27 ME0342-4B
3.2.2 I/O Signals in Pulse Train Control Mode and Each Functions
[1] PIO Patterns and Signal Assignment
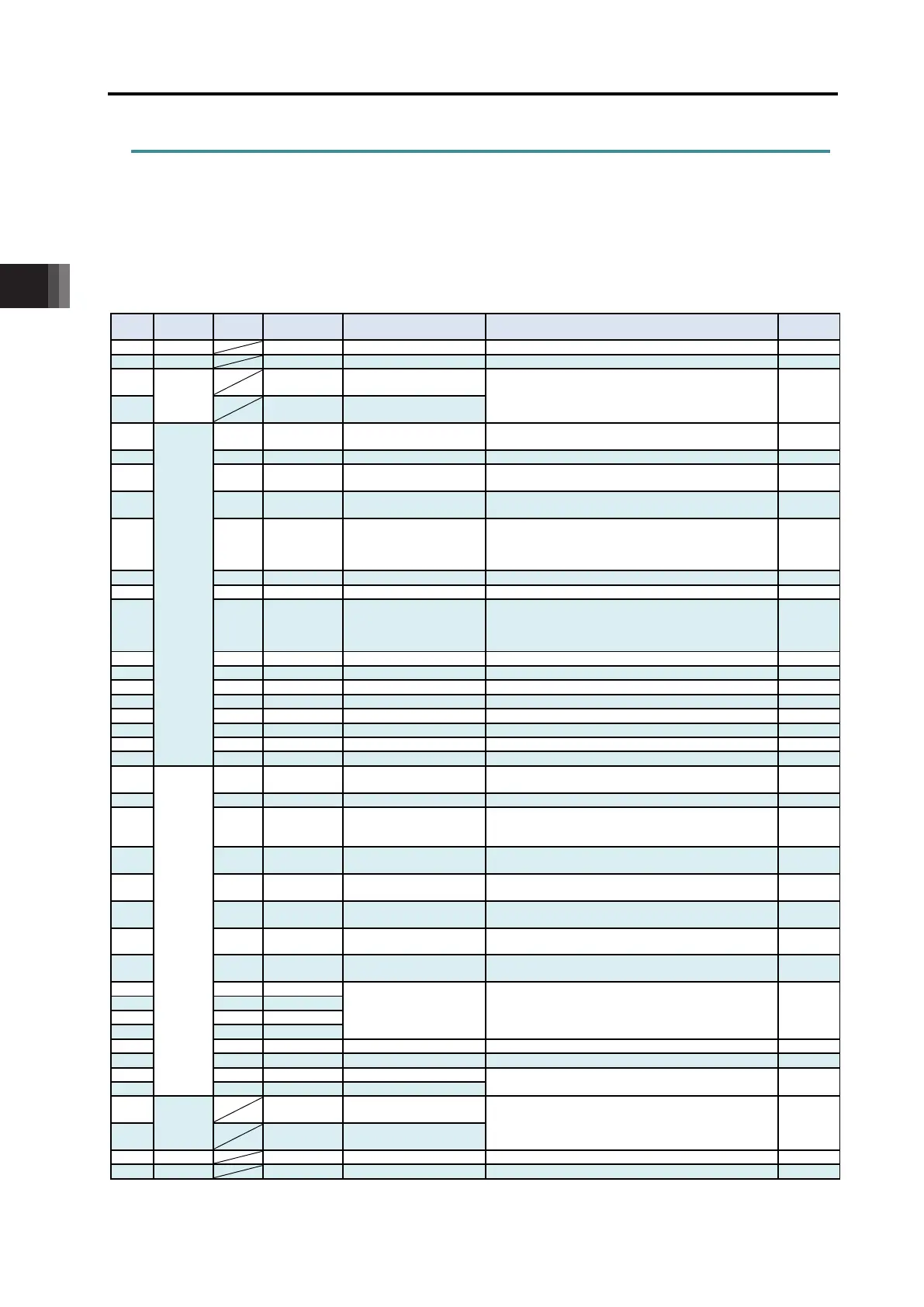
The signal assignments of the I/O flat cable by the PIO patterns are as shown in the table
below.
Follow the following table to connect the external equipment (such as PLC).
1) PIO Pattern 6 ············· Pulse Train Control Mode (Incremental Type for Actuator)
Category
I/O No.
Signal Name Function Description
Power Supply for I/O +24V
Power Supply for I/O +24V
3A
Pulse
Input
PP
Differential Pulse Train
Input (+)
Input the differential pulse from the host.
Input is available up to 200kpps at maximum.
4.3.3 [1]
4A /PP
Differential Pulse Train
Input (-)
5A
Input
IN0 SON Servo ON
The servo remains ON while this signal is ON, or
OFF while this signal is OFF.
4.3.2 [5]
Turn the signal ON to reset the alarm.
7A IN2 HOME Home Return
The controller will perform home return operation
when this signal is turned ON.
4.3.2 [6]
8A IN3 TL Torque Limit Select
Applies torque limit to the motor with the signal ON
and the value set to the parameter.
4.3.3 [3]
9A IN4 CSTP Compulsory Stop
Turning it ON continuously for more than 16ms
forcibly stops the actuator.
The actuator decelerates then stops with the torque
set in the controller and then turns the servo OFF.
4.3.2 [4]
Clears the deviation counter.
The brake will forcibly be released.
12A IN7 RMOD
Operation Mode
Changeover
The operating mode is selectable when the MODE
switch of the controller is set to AUTO.
(The setting is AUTO when signal is OFF, and
4.3.2 [3]
1B
Output
OUT0 PWR System Ready
It turns ON when the control becomes available
after the main power is supplied.
4.3.2 [1]
This signal will remain ON while the servo is ON.
3B OUT2 INP Position Complete
Turned ON when the remaining moving pulses in
the deviation counter enters within the positioning
4.3.3 [2]
4B OUT3 HEND Home return completion
This signal will turn ON when home return has
been completed.
4.3.2 [6]
5B OUT4 TLR Torque Under Control
Turns ON if the torque reaches the limit value
during torque limit.
4.3.3 [3]
6B OUT5 *ALM Controller Alarm Status
Turns ON when controller in normal condition, and
OFF when alarm is generated.
4.3.2 [9]
7B OUT6 *EMGS Emergency Stop Status
Turns ON when the controller emergency stop is
cancelled, and OFF during the emergency stop.
4.3.2 [2]
8B OUT7 RMDS Operation Mode Status
The operating mode status will be output. It turns
ON when the controller is on Manual Mode.
4.3.2 [3]
Alarm Code Output
Signal
The alarm code is output together with the alarm
signal output.
Refer to Alarm List for details.
4.3.2 [10]
Outputs when a message level alarm is generated.
This signal will turn ON when the current actuator
position enters the range set by the parameters.
4.3.2 [8]
17B
Pulse
Input
NP
Differential Pulse Train
Input (+)
Input the differential pulse from the host.
Input is available up to 200kpps at maximum.
4.3.3 [1]
18B /NP
Differential Pulse Train
Input (-)
Signal with “*” expresses the signal of active low. It is ON when the power is applied to the controller, and turns OFF when the
signal is output.

 Loading...
Loading...






