5. Various Functions
5.1 Collision Detection Feature
5-3 ME0342-4B
5.1.2 How to Settings
(1) Selecting functions to be used
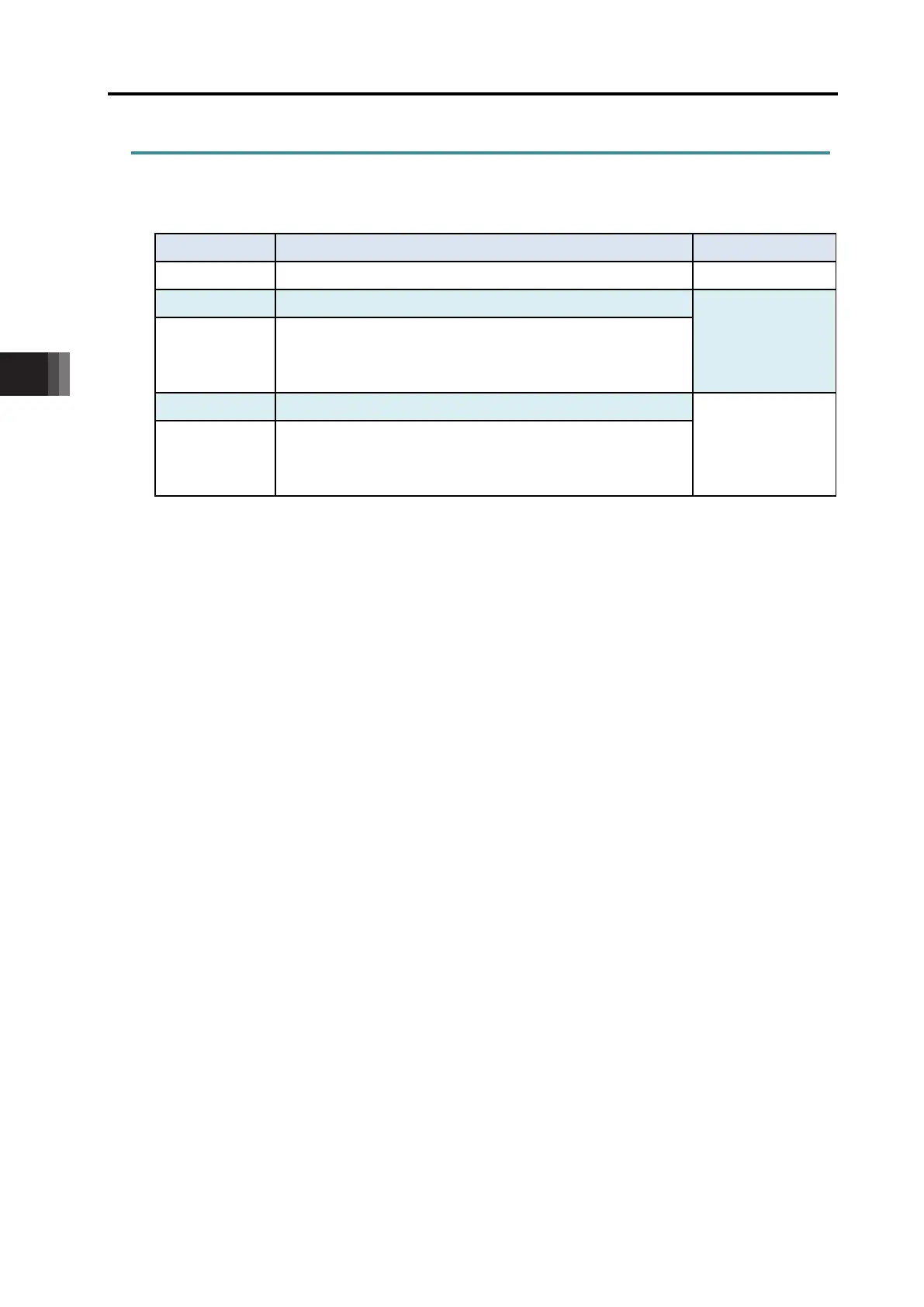
Set with a parameter. Set Parameter No. 168 "Collision Detection Function."
Set value Content Alarm level
0 No detection will be made (same even if 2, 4, 6 are set) -
1 Detects within the set range of the position zone.
Operation cancel
level
(Alarm code 0DF)
3
(Note 1)
Detects within the set range of the position zone; however,
no detection will be made in the following cases.
• First travel after pause release
• Travel from stop status within position zone range
5 Detects within the set range of the position zone.
Message level
(Alarm code 049)
7
(Note 1)
Detects within the set range of the position zone; however,
no detection will be made in the following cases.
• First travel after pause release
• Travel from stop status within position zone range
Note 1: This setting helps to avoid false detection due to increased current during acceleration.
(2) Setting of detection current value
Set the "threshold" field of the position table to 0 ~ 100 [%]. No detection will be made if 0 is
set.
(3) Setting of judgment time
Set with a parameter. Set Parameter No. 50 "Load Output Judgment Time."
Set range: 0 to 9,999 [ms] (initial value 255ms)
(4) Setting of judgment range (position zone)
Set the range in "zone +" and "zone -" of the position table. When setting, be sure to set the
value of "zone -" smaller than that of "zone +."
Set range: 0.00 to actuator stroke length [mm]

 Loading...
Loading...






