4. Operation
4.2 Operation in Positioner Mode
4-86 ME0342-4B
Note 1 Regarding Start Signal ST0 before Home-Return Operation
• When Parameter No. 27 “Move command type” Set to “0 (factory setting)”
The actuator moves to the home direction while ST0 Signal is ON and stops when
ST0 Signal turns OFF. Once it reaches the mechanical end with ST0 Signal ON, the
home-return operation will be performed.
• When Parameter No. 27 “Move command type” Set to “1”
The home-return operation starts at the same time as ST0 Signal turns ON.
Operation will not stop even if ST0 Signal turns OFF.
Note 2 For RCP5 absolute setting, HEND = OFF should be kept till servo gets on after the
power is turned ON.
Caution
Note that the actuator may go for positioning without stopping after home-return
complete in some settings.
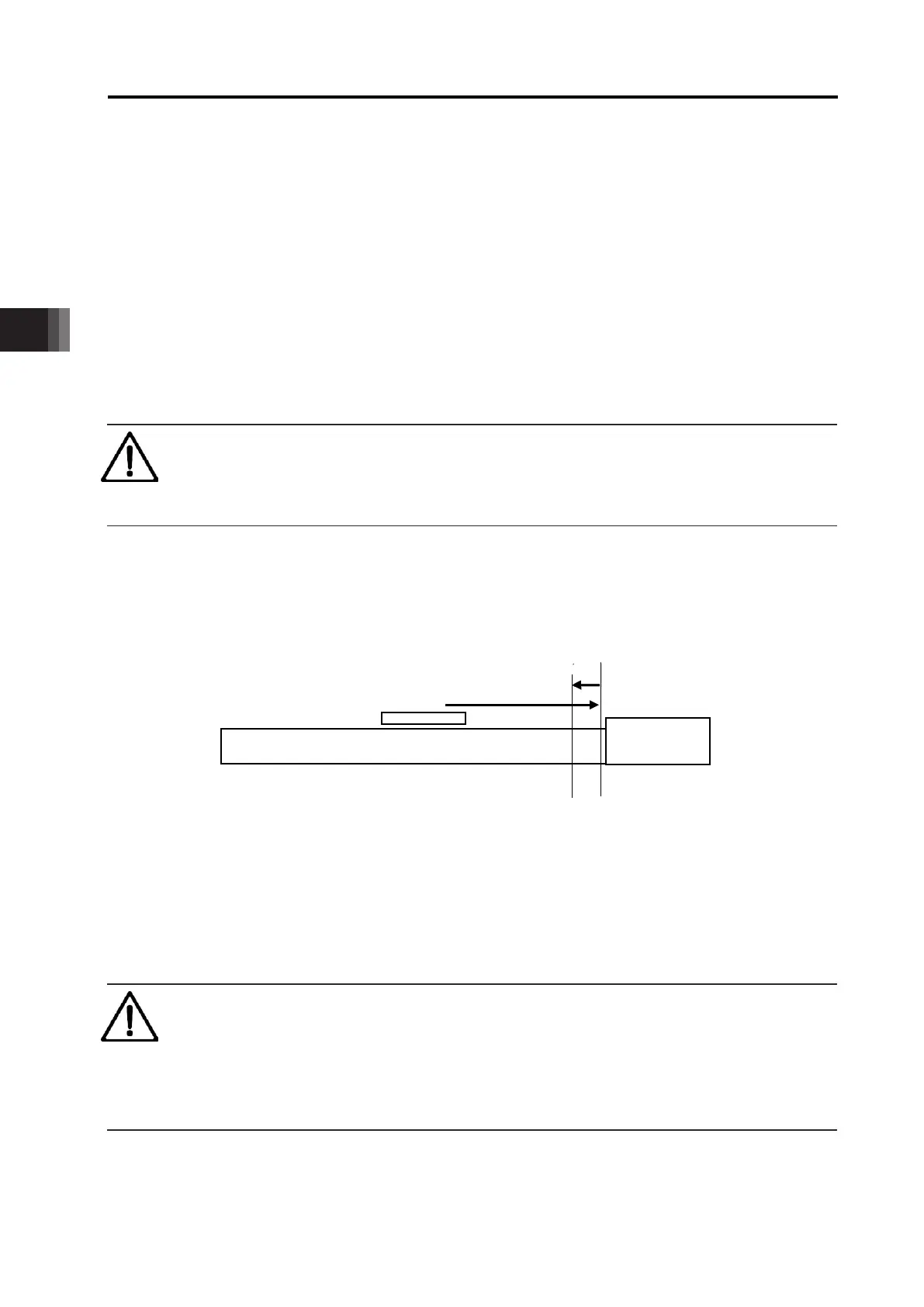
[Home Return Operation of Slider Type/Rod Type Actuator]
1) With the ST0 signal being ON, the actuator moves toward the mechanical end at the home
return speed.
The moving speed is 20mm/s for most actuators but less than 20mm/s for some actuators.
2) The actuator is turned at the mechanical end and stopped at the home position. The moving
distance is the value set by Parameter No.22 “Home return offset level”.
Caution
● In the home reverse specification, the actuator moves in the reverse direction.
● Make sure to refer to [6.1.2 [16]] when a change to Parameter No.22
“Home return offset level” is required.

 Loading...
Loading...






