4. Operation
4.3 Pulse Train Control Mode
4-106
ME0342-4B
[4] Compulsory Stop (CSTP)
PIO signal
This signal is used to forcibly stop the actuator.
Input the CSTP signal continuously for 16ms or longer. Once the CSTP signal is received, the
actuator decelerates and stops with the maximum torque, and then turns the servo OFF. At this
time, the deviation counter is cleared.
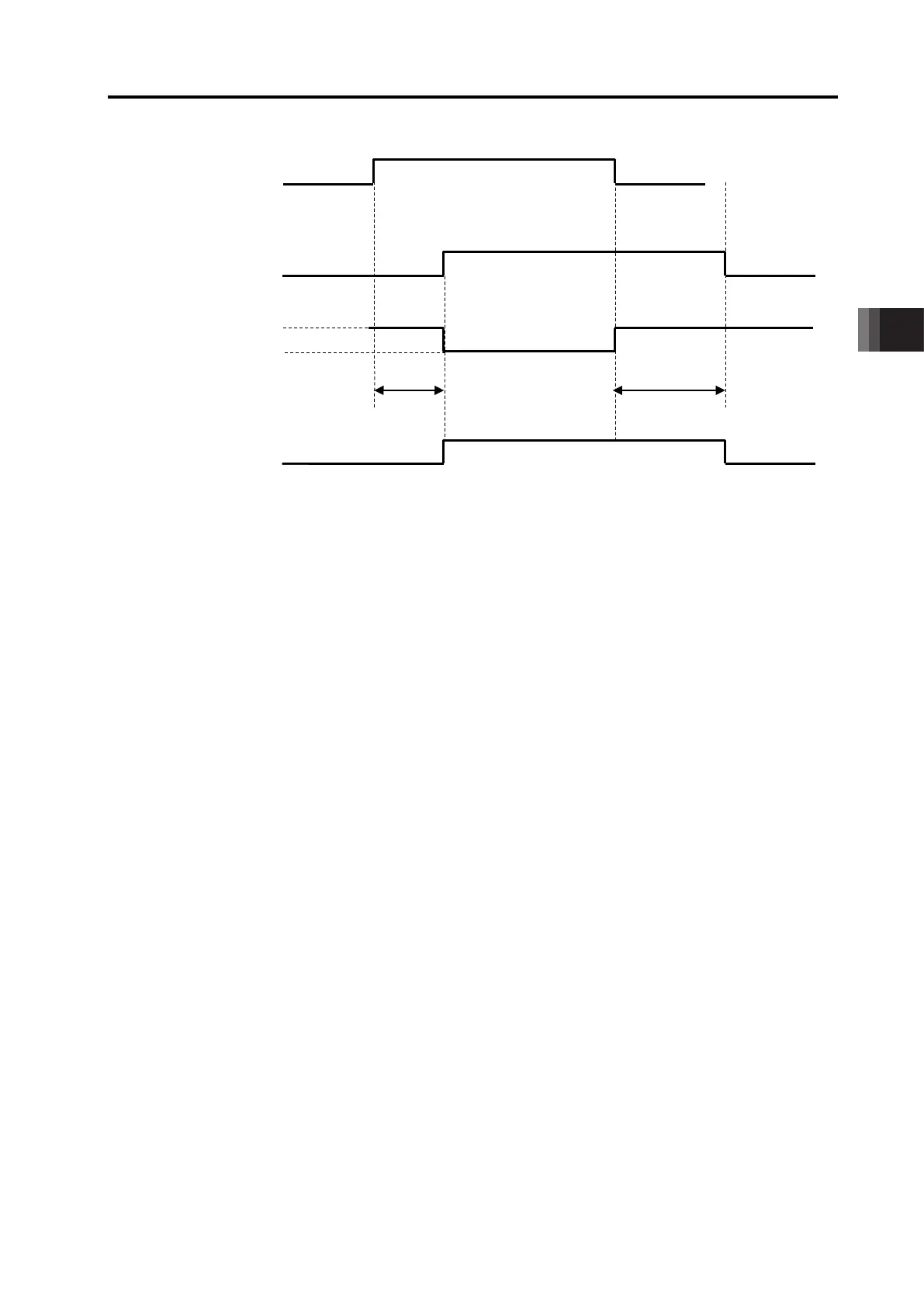
[5] Servo ON (SON, SV, PEND)
PIO signal
1) Servo ON signal SON is the input signal making the servo motor of the actuator operable.
2) If the servo-on is performed to enable operation, the SV output signal is turned ON.
Concurrently positioning completion signal INP is turned ON.
3) With the power being supplied, then controller cannot be operated while the SV signal
remains OFF. If the SON signal is turned OFF under operation of the actuator, the actuator is
decelerated and stopped with the maximam torque. After the stop, the servo OFF occurs to
enter the motor into the free running state.
The brake (option) is of release-in-excitation type. Therefore, making the excitation on will
release the brake while making it off will lock the brake.
4.3 Pulse Train Control Mode
ME0342-4B 4-107
T (before detecting excitation)
(Note 1)
= SON signal identification (6ms) + Excitation detection time (T1 + T2)
× Number of retry (10 times Max.) + Servo ON delay time (T3)
T (after detecting excitation)
(Note 1)
= SON signal identification (6ms) + Servo ON delay time (T3)
T1 : Parameter No.30 It differs depending on the setting of excitation detection type.
Set Value = 0 → 160ms
Set Value = 1, 2 → 220ms
T2 : Parameter No.29 Setting of excitation phase signal detection time
It is set to 10ms in the initial setting.
T3 : Fixed to 20ms
Note 1 Excitation check operation is performed at the first servo-on process after the power is
turned on for the incremental type and absolute battery type, and when the home return
is completed for the simple absolute type to identify the magnetic poles of the motor.
Note 2 PEND would not turn ON in the pause condition.
● Servo OFF status
1. Once the actuator stops, no retaining torque will be supplied.
2. The pulse train input, HOME (home return signal), TL (torque-limiting selection signal) and
CSTP (external forced stop signal) are all ignored.
3. Output signals SV (ready signal), HEND (home return complete signal) and TLR (torque
limiting signal) are all cleared (turned OFF).
4. INP (Positioning Completion Signal)
The INP (Positioning Completion Signal) is OFF when the servo is OFF.
T 26ms
PEND
(N
R

 Loading...
Loading...






