4. Operation
4.3 Pulse Train Control Mode
4-116
ME0342-4B
4.3.3 Pulse Train Input Operation
[1] Command Pulse Input (PP
•/PP, NP•/NP)
In the differential type, it is able to have 200kpps of pulse train input at maximum. When the
host controller possesses only the pulse output function of the open collector, it is able to input
200kpps pulse at maximum by connecting AK-04 (option).
6 types of command pulse train can be selected. Set the pulse train format in Parameter No.63
and active high/low in Parameter No.64. Refer to [4.3.4 Settings of Basic Parameters Required
for Operation]
Caution
● The directions in which the actuator moves upon receiving forward and reverse pulses
conform to the pulse count direction set in Parameter No.62.
● As for the forward/reverse directions, pay attention to the host controller setting or
PP•/PP and NP•/NP connections.
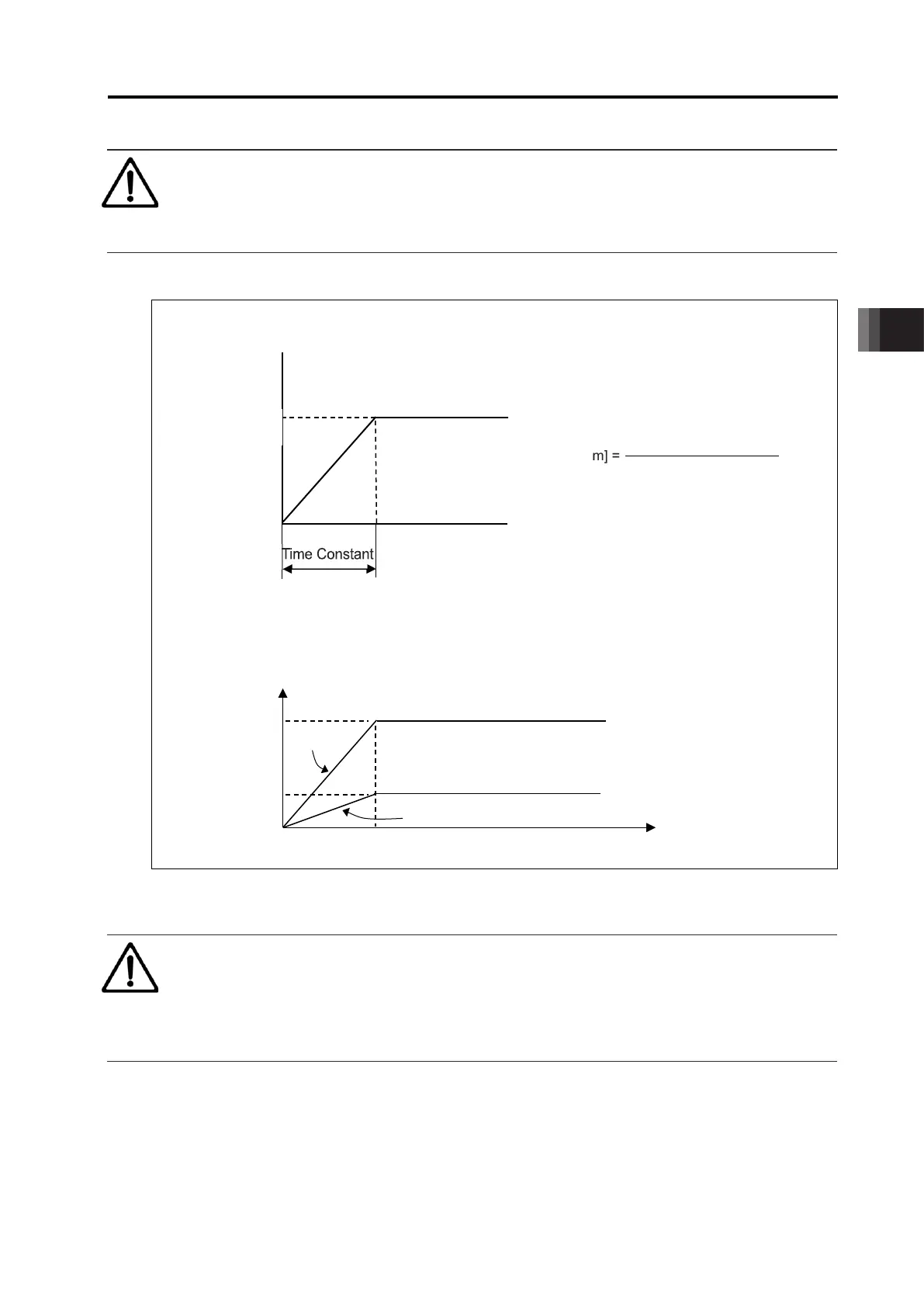
● Set the actuator acceleration/deceleration on the host controller side.
● The actuator acceleration/deceleration should not exceed the rated
acceleration/deceleration of the applicable actuator. Refer to [Instruction manual of each
actuator
] for the rated acceleration/deceleration of each actuator.
* The rotating direction of the motor is defined so that the counterclockwise direction as
viewed from the end of the load shaft represents the forward direction.

 Loading...
Loading...






