12. Commissioning
MiR250 Hook User Guide (en) 01/2023 - v.1.2 ©Copyright 2021-2023: Mobile Industrial Robots A/S. 163
The undocking sequence will always occur if a robot begins an action where it plans a new route
while inside the undocking area, even if the robot was not previously docked to the marker. This
means the sequence is also initiated on robots that have entered the area via a Relative move
action or Manual control.
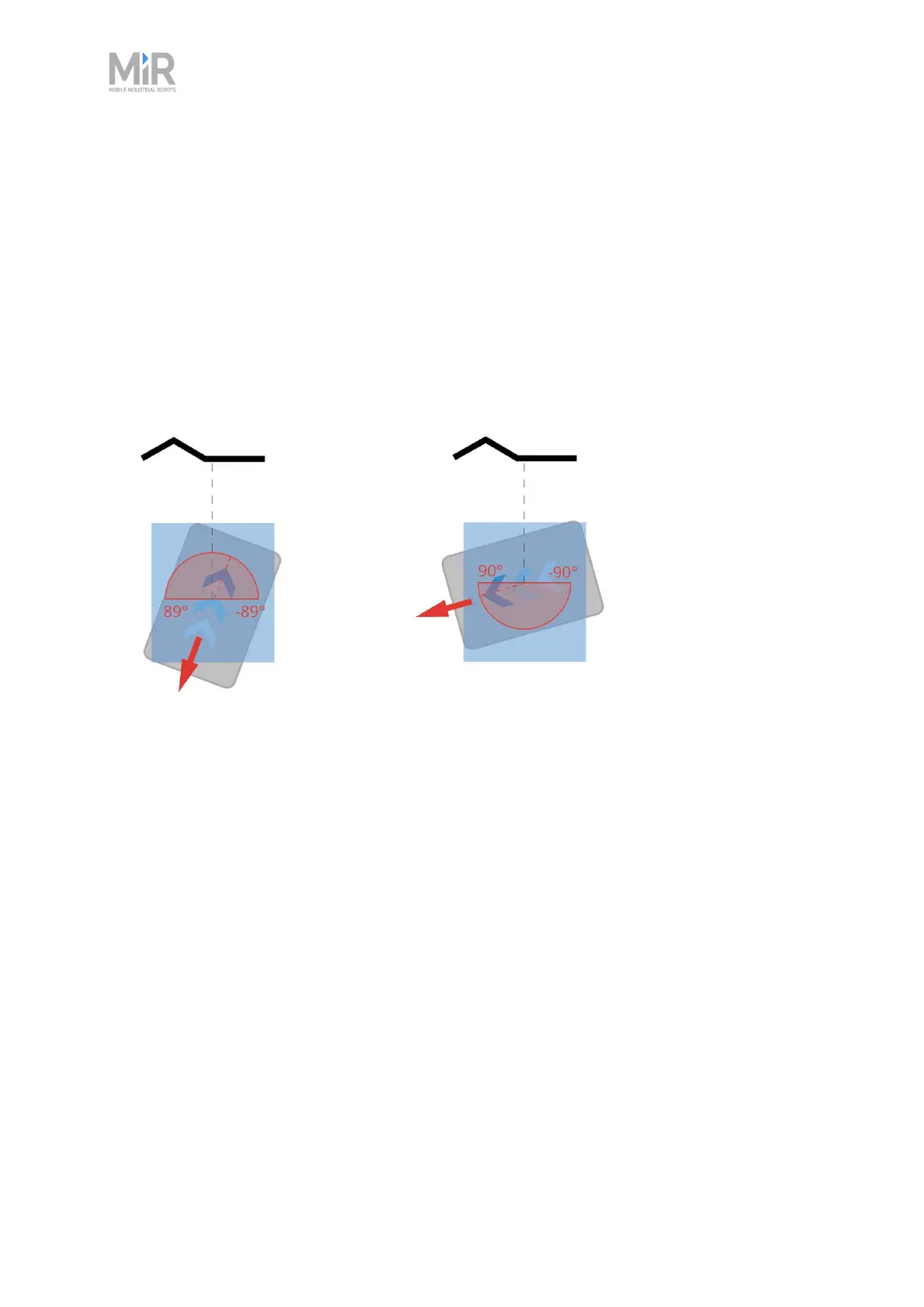
The robot will reverse from the marker as long as it's orientation to the marker is below 90°.If the
orientation difference is greater than 90°, the robot will move forward to exit the undocking area
instead. This means that if the robot reverses into the area or is perpendicular to the marker, it
will undock by moving forward.
Figure 12.15 Robots that stop inside the undocking area at an angle less than 90° to the marker undock by
driving backward. Robots that stop with an angle greater than 90° undock by driving forward.
L-markers are the only markers that do not support automatic undocking. If you want a robot to
undock from anL-marker, you must use a Relative move action.
Marker accuracy
If you have more than one robot, you may experience that robots do not all dock to markers with
the same accuracy.
Robots will dock with a high precision, meaning that the same robot will dock to almost the same
position to the same marker.
If you want to increase precision, ensure that you are using Slow docking—see "Fast docking and
Slow docking" on page160.