12. Commissioning
MiR250 Hook User Guide (en) 01/2023 - v.1.2 ©Copyright 2021-2023: Mobile Industrial Robots A/S. 170
To create efficient missions, you should first familiarize yourself with the available actions in MiR
Robot Interface—see MiRRobotInterfaceGuide—and then consider:
• Which tasks do I want the robot to perform?
• Which actions are involved in this task and in which order are the actions executed?
• How much do each of these tasks differ?Are they similar enough that you can reuse the same
mission but use variables for some of the parameters? If so, identify which of the parameters
change in each mission—see Figure 12.20.
• Are there small parts of different missions that are the same each time where it would be
worthwhile to make a mission for the repeated task and nest this mission into the larger
missions? For an example, see Figure 12.21.
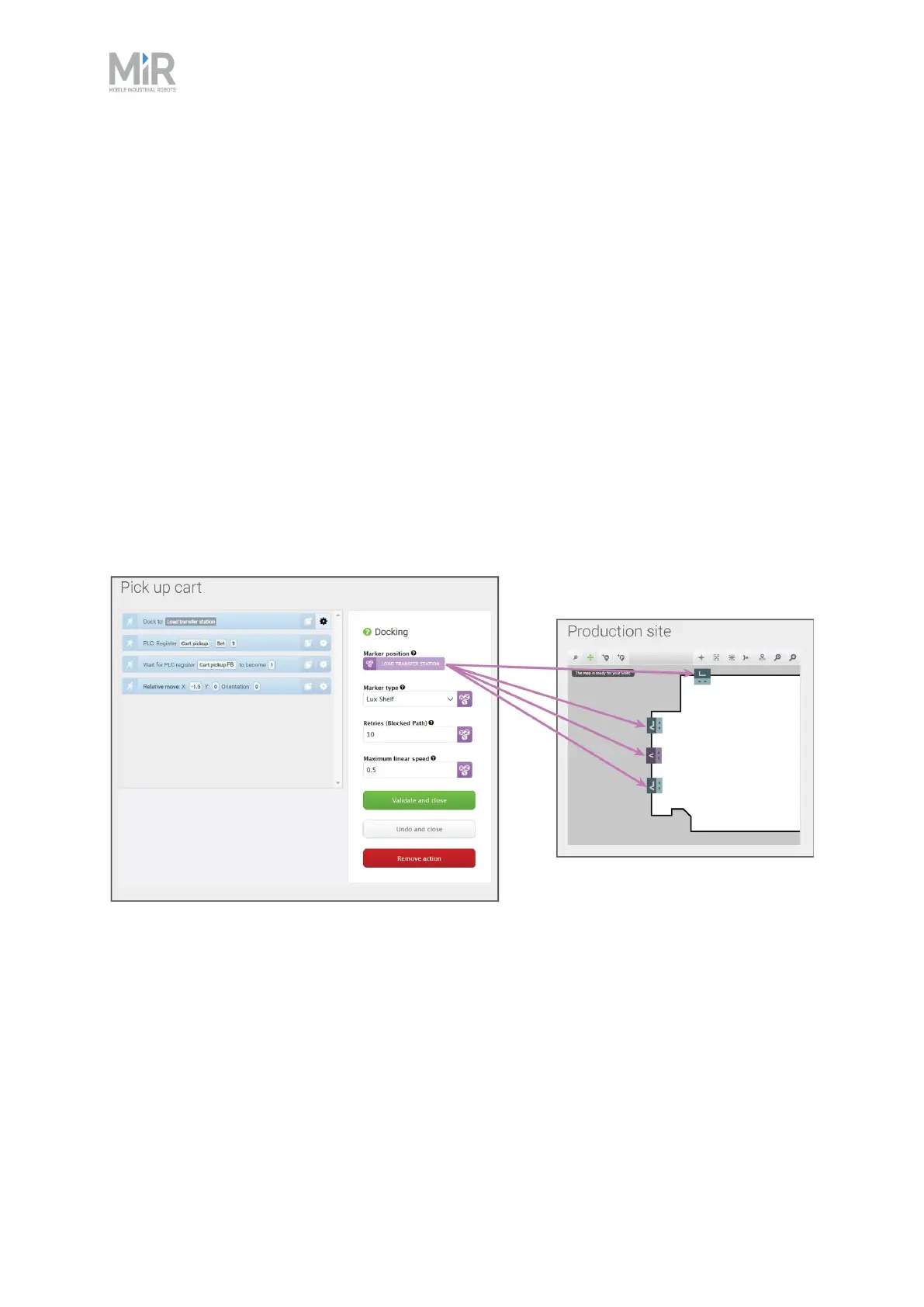
Figure 12.20 You can use variables to make a mission where you can set a parameter in one of the actions
each time you use the mission (either when you add the mission to the mission queue or nest it in another
mission). In this example, you can set the variable Load transfer station to any marker created on the map.
This means that you can use the same mission for making the robot pick up a load from any of the markers
on the map.