104
Rev. 2.0
07/27/2023
MBDV Hardware Manual
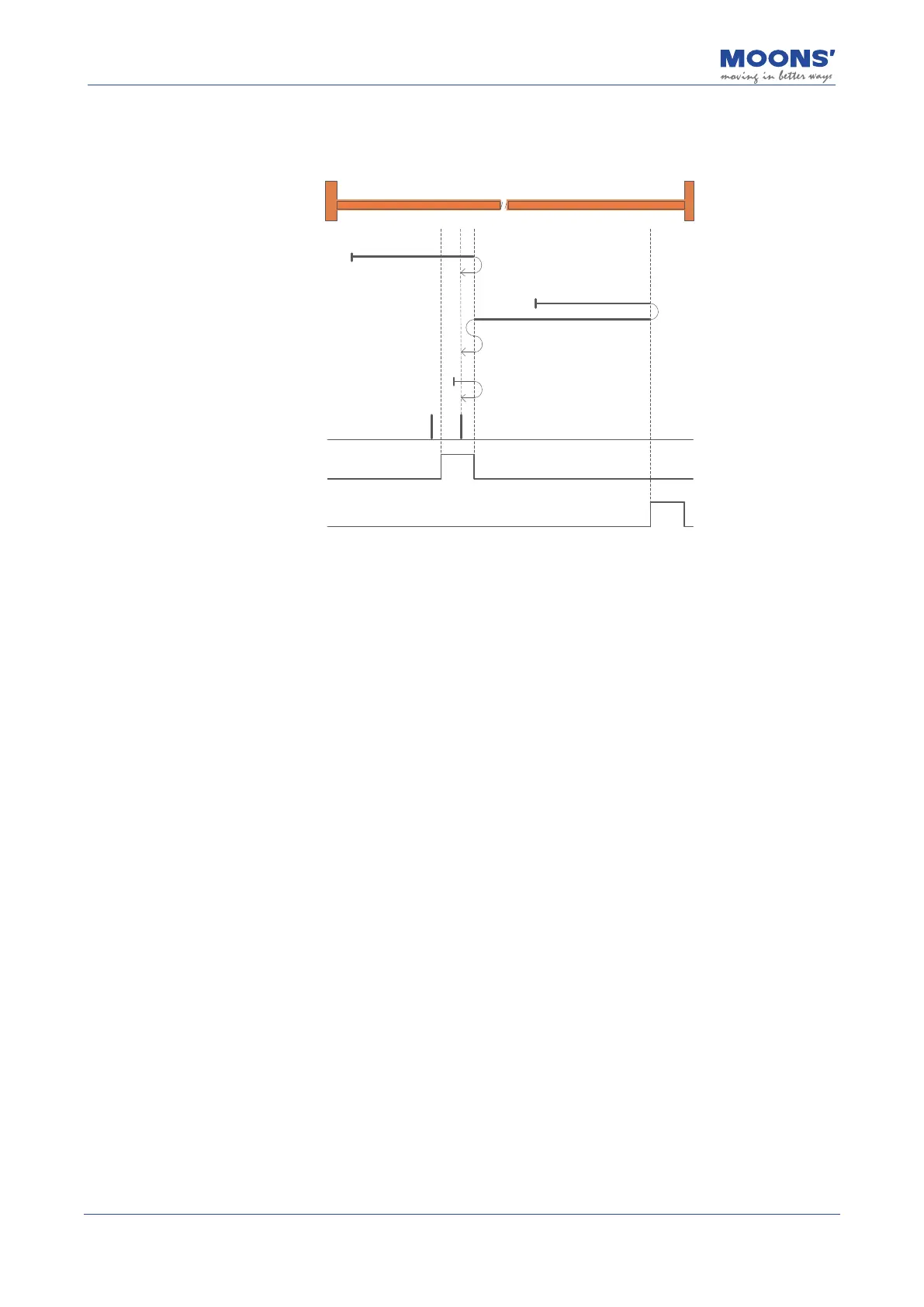
7.8.2.13 Return-to-origin method 9: forward return, look for the rising edge of the origin
sensor and Z pulse signal, and automatically reverse when encountering the positive limit
H
H
H
L
L
L
L
Home Switch Signal
Positive Limit Switch Signal
Movement Track
Z-phase Signal
a) When starting to return, HOM-SW=0 and it is located on the negative side of the position of
the origin sensor, start the return at a positive high speed, and encounter a drop in HOM-SW
Decelerate after the edge, reverse, and run at low speed in the negative direction, and stop at the
rst Z pulse after the rising edge of HOM-SW.
b) When starting to return, HOM-SW=0 and it is located on the positive side of the position of the
origin sensor, start the return at a positive high speed, and encounter the rising edge of POT Then,
decelerate, reverse, and run at high speed in negative direction; after encountering the rising
edge of HOM-SW, decelerate, reverse, and run at low speed in forward direction until HOM-SW
is invalid. After the position, it decelerates to stop, and then runs at a low speed in the negative
direction, and stops at the rst Z pulse after encountering the rising edge of HOM-SW.
c) HOM-SW=1 when starting to return, start returning at low speed in positive direction, after
encountering the falling edge of HOM-SW, decelerate, reverse, and run at low speed in negative
direction, The rst Z pulse after encountering the rising edge of HOM-SW stops.