132
Rev. 2.0
07/27/2023
MBDV Hardware Manual
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-08 HC Hard Stop Home Current Limit 200 0 ~ 3000 0.1% P S T
Sets the hard stop homing current limit. While hard stop homing, once the motor draws this current level, the motor drive determines
that the mechanical limit of the system has been reached. Hard stop homing does not require homing switches or limit switches to
home. It functions entirely o of the HC value, a mechanical hard stop and the home oset value (HO). Refer to section 7.
8
for more
information.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
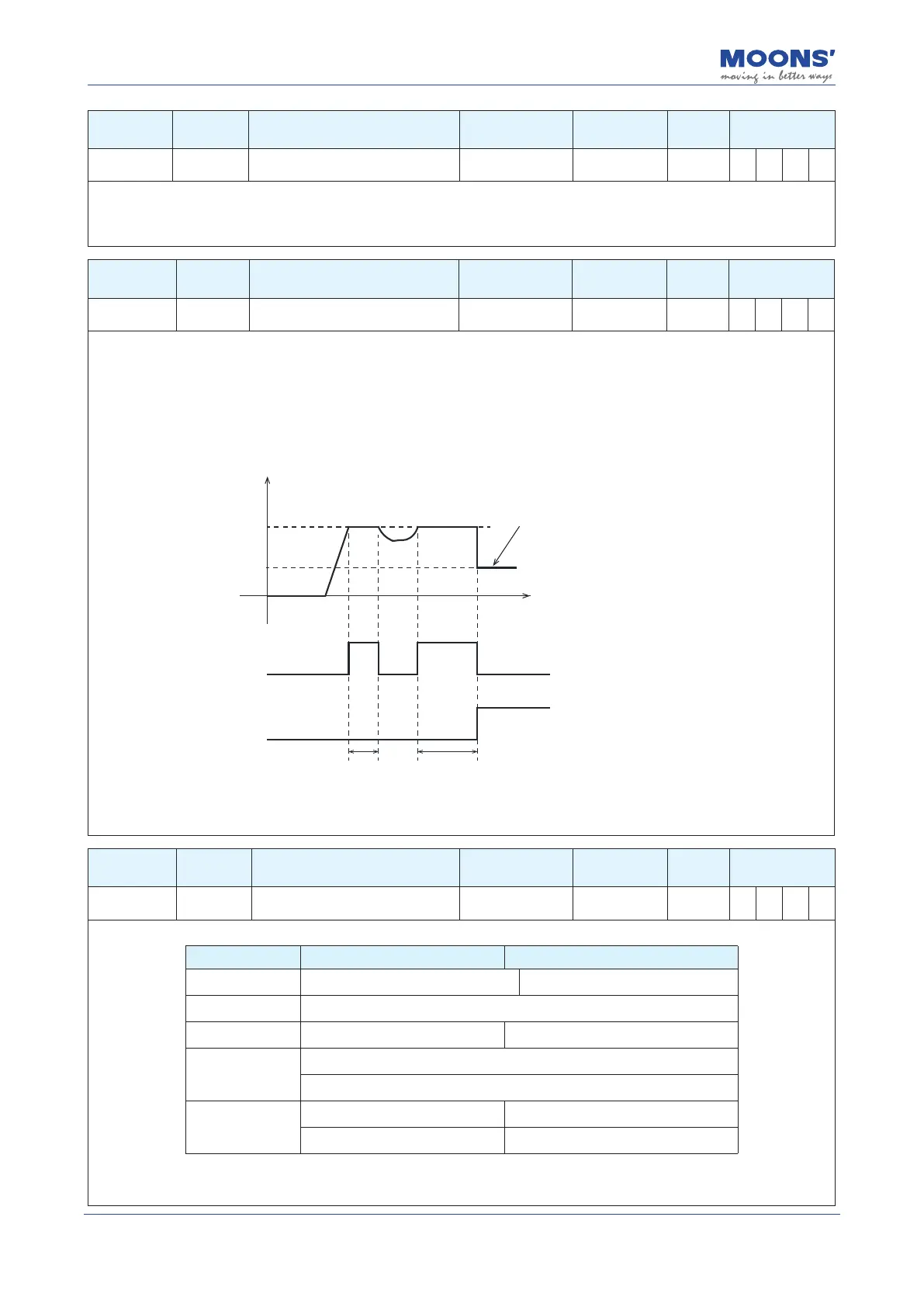
P1-09 CL Current Foldback Timer 0 0 ~ 30000 ms P S T
Servo motors have the ability to provide peak torque (overload torque), above that set by the continuous current value (P1-06). This
parameter sets the duration of torque overload.
●
When the overload time exceeds this set value, " r16CL " overload alarm will be generated.
●
If the set value is too large, long-term overload will easily cause the motor to overheat and damage.
●
During torque control, this function is invalid.
●
When the set value is " 0 ", the " r16CL " overload alarm will not be generated, and the servo motor provides an overload output
capability of 2 seconds.
Torque
Limit Value of P1-06
Motor Rated Torque
Time
Signal output during
torque limit
The time has not yet
reached the time set
by P1-09 and the time
set by P1-09 has exceeded
the time set by P1-09.
T-LMT
No Output
No Output
Output
Output
No Output
Fixed value, no alarm
setting is generated,
r16CL is generated
Afterenerated,
r16CL is generated
r16CL Overload Alarm
# The torque output is limited to the motor rated torque
Constant torque
# If the reference torque output is still greater than Motor rated
torque setting value, actual limit value of P1-06 will always
be limited to the motor
Rated torque
# Only when the reference torque is less than the motor rating
rated torque of the motor is constant torque, after a certain time,
to be overloaded again
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-10 LD Torque limit method 1 1 ~ 5 ms P S T
Parameter P1-10 denes 5 torque limit modes, each of which is as follows.
Set value Forward direction Reverse direction
0 Register Y Register Z
1 Parameter P1-06
2 Parameter P1-06 Parameter P1-25
3
TQ-LMT input is valid: P1-06
TQ-LMT input is valid: P1-25
5
If TQ-LMT input is valid
:
P1-06 If TQ-LMT input is valid
:
P1-25
If TQ-LMT input is invalid: P1-26 If TQ-LMT input is invalid
:
P1-27
Please refer to chapter 7.5 Torque limit