133
Rev. 2.0
07/27/2023
MBDV Hardware Manual
Parameter Instruction Name Defaults Range Unit
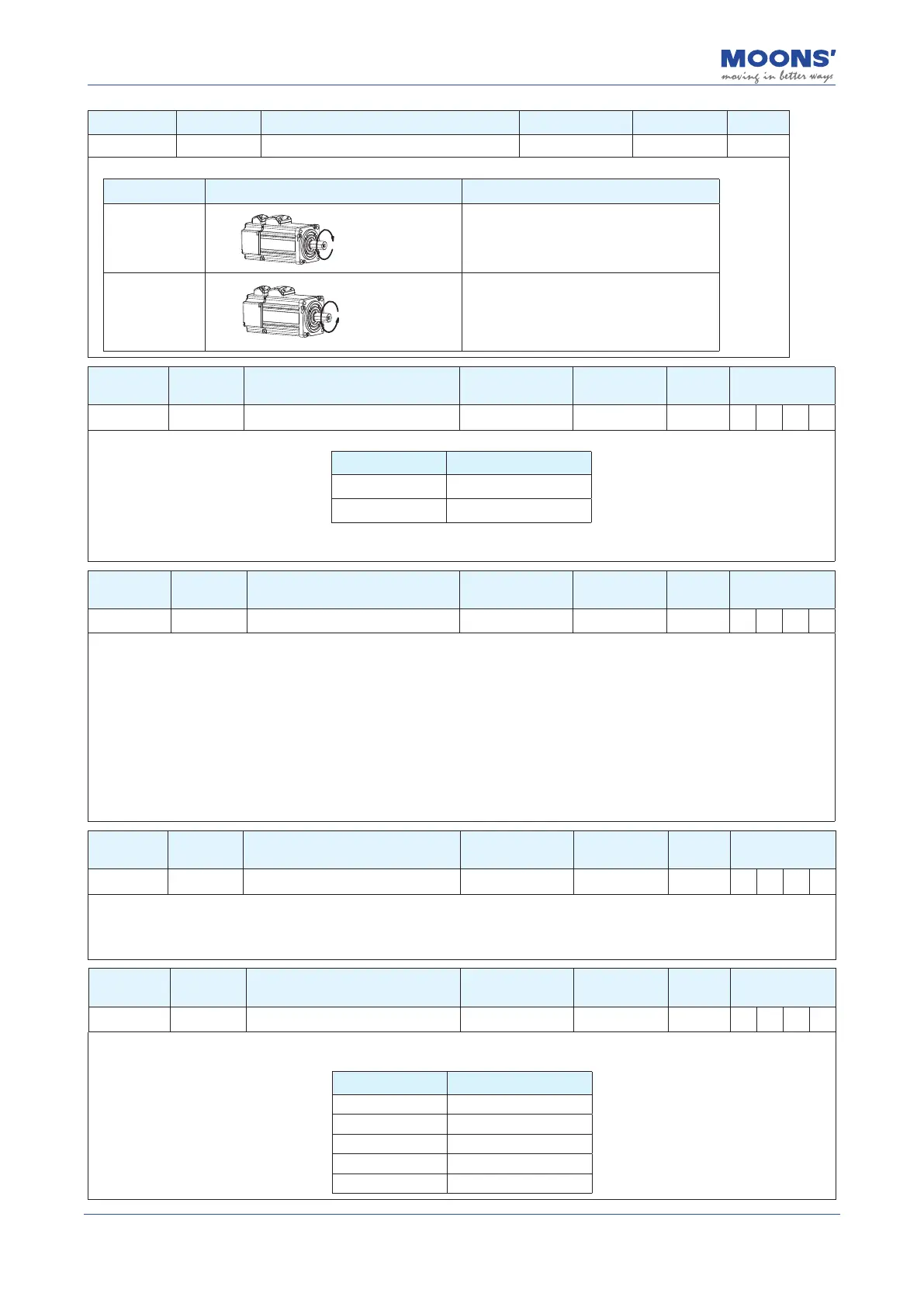
P1-11 DR Rotation Direction 0 0
,
1 -
Set the relationship between the direction of the command and the rotation direction of the motor:
Set value Direction of rotation Description
0
Clockwise rotation
when direction positive
When the commanded direction of motion is
positive, the direction of rotation of the motor
shaft is clockwise when viewed from the front
end of the motor.
1
Counterclockwise rotation
when direction positive
When the commanded direction of motion is
positive, the direction of rotation of the motor
shaft is counterclockwise when viewed from
the front end of the motor.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-12 IF Immediate Format H D,H - P S T
This parameter sets the format of data communicated via the SCL protocol.
Set value Mode
D Decimal system
H Hexadecimal system
Ex: If reading the encoder position, using EP command, and the current position value is 20000 counts but we switch P1-12 to setting
"H", the return value of EP would be 4E20 (hex)
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-13 PR Protocol 5 1 ~ 511 - P S T
This parameter congures serial communication using a binary setting. The following describes the eect of each bit:
Bit 0 = by default set to 1, prescribes standard SCL communication
Bit 1 = Always use address character
Bit 2 = use Ack/Nack
Bit 3 = use Checksum
Bit 4 = (set if communication is RS-485)
Bit 5 = 3-digit numeric register addressing
Bit 6 = Checksum Type
Bit 7 = Little/Big Endian Format (Modbus)
Bit 8 = 2-wire or 4-wire (RS-485)
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-14 TD Transmit Delay 2 0 ~ 20 ms P S T
Sets or requests the time delay used by the drive when responding to a command that requests a response.
Typically this is needed when using the 2-wire RS-485 interface (Half-duplex). Because the same wires are used
for both receive and transmit a time delay is usually needed to allow transition time. The Host device
’
s RS-485
specication must be understood to determine the time delay needed.
Parameter Instruction Name Defaults Range Unit
Related
Patterns
P1-15 BR RS-485 communication baud rate 1 1 ~ 5 - P S T
The baud rate that takes eect after power-on in serial communication. This value will be saved immediately after being congured
but will not take eect immediately until the next power-on, so the upper computer software can congure this value at any time.
Set value Speed
1 9600bps
2 19200bps
3 38400bps
4 57600bps
5 115200bps