155
Rev. 2.0
07/27/2023
MBDV Hardware Manual
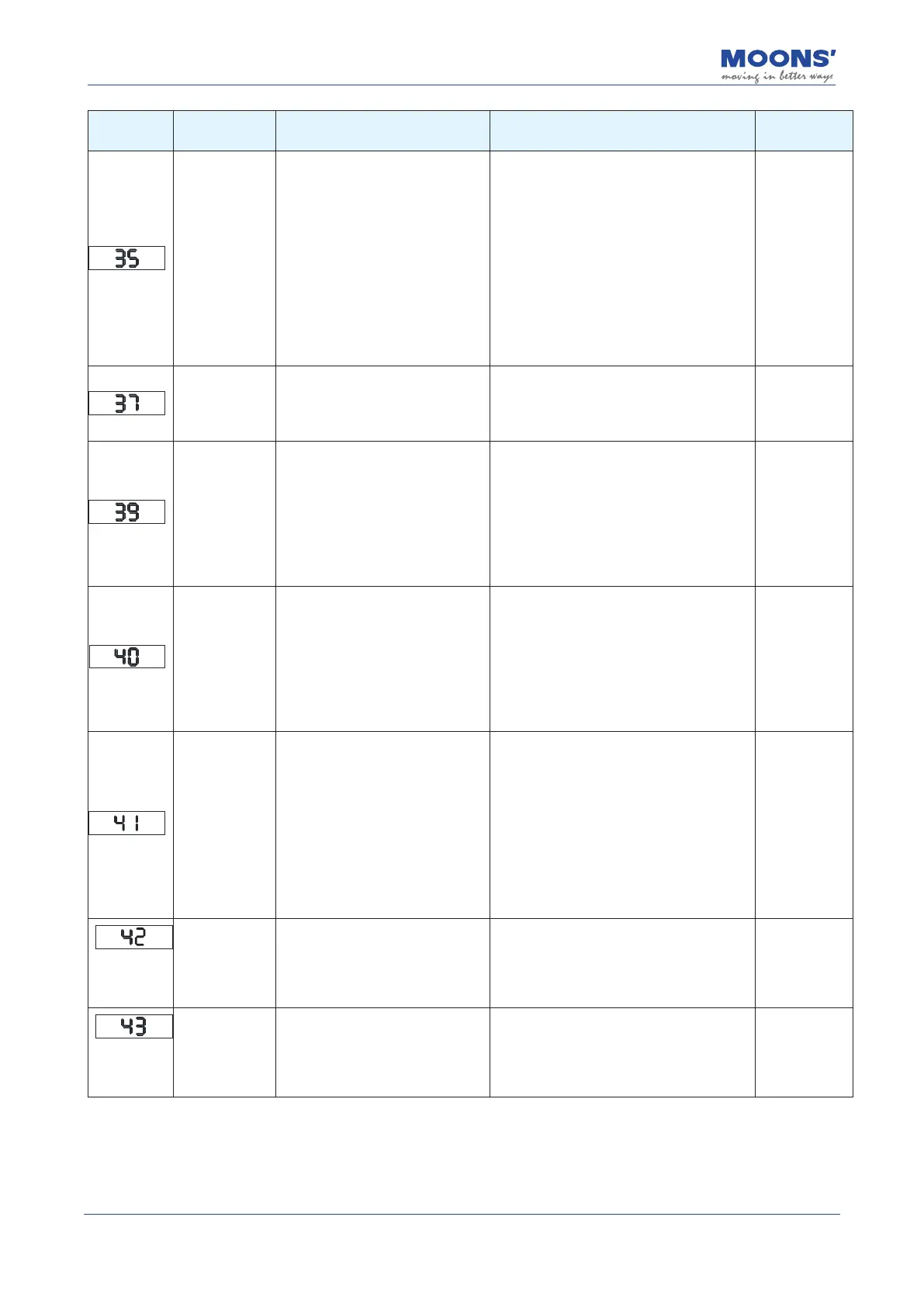
Display
content
Description Alarm Causes Alarm Fixes
Alarm Status
Drive
processor
over
temperature
Drive processor temperature is too
high
1. Detect whether the temperature of the drive
installation environment is too high
2. Reduce the ambient temperature of the
drive and improve the cooling conditions
3. The drive needs to be mounted on a metal
backplane with good heat dissipation
4. Increase the capacity of the driver and
motor, and extend the acceleration and
deceleration time
time, reduce the load.
5. Replace the fan or send in the servo drive
for repair
6. Alarm after drive heatsink temperature is
normal and power cycle
still exists, please replace the drive
Alarm clear
Motor stall
Working in non-torque mode, when
the motor is stalled
time exceeds the time set by P1-28
1. Check whether the mechanical parts driven
by the motor are stuck
2. Check if the electromagnetic brake is open Alarm clear
Homing
parameters
conguration
error
Origin returns parameter
conguration error
1. Use the back-to-origin method
with limit signal,
Limit
Signal not congured
2. Use the back-to-origin method
with the origin signal,
origin
Signal not congured
Check whether the origin return parameters
are fully congured Alarm clear
Motor Collision
Alarm
The servo system detects that the
motor current is abnormal
mutation
1. Motor-driven loads with other xed
negatives load collision
2. The servo gain setting is
unreasonable and the gain is too
large
3. Motor UVW phase sequence error,
motor speeding
1. Check motor UVW phase sequence
2. Check whether the servo gain parameters
are reasonable
3. Check the load
Alarm clear
Encoder
communication
error
The servo system detected an
abnormality in the communication
with the servo motor encoder
1. Coded wires are not wired as
correctly dened
2. There is no connection code
between the drive and the motor
device line
3. The encoder wire is in poor
contact or disconnected
4. Interference causes abnormal
encoder communication
5. Encoder damaged
1. Check that the encoder wiring is according
to the correct denition
2. Check the connection between the encoder
cable and the driver and motor
3. Make sure the motor and driver are well
grounded
4. The encoder cable uses a twisted pair with
good anti-interference ability shielded wire
5. Swap the motor and encoder wiring harness
respectively, and conrm that the motor is no
exception
Re-power on to
clear
IO signal used
is not general
purpose
1. The function of the I/O signal used
in the Q program is not a general-
purpose function
2. Functions of I/O Signals Used in
SCL Instructions
for non-generic functions
1. Congure the relevant I/O signal function as
a general function
2. Use I/O signals whose functions are
general-purpose functions
Alarm clear
Bus watchdog
trigger
bus watchdog function is turned on
1. Within the set time, the drive does
not receive the specied message
1. Check if the CANopen communication line
is well connected
2. Check that the time set in the drive to detect
a specic message is no too short
3. Check whether the time when the controller
side sends a specic message too long
Alarm clear