163
Rev. 2.0
07/27/2023
MBDV Hardware Manual
• Load inertia ratio
If the current load inertia ratio is known, input it into " Load inertia ratio (P0-02)
“
, which can
improve the system mechanical Stiness and speed up the auto-tuning speed. If you do not know
the current load inertia ratio, you do not need to ll in, the system will automatically identify the load
inertia ratio.
• Motion control source custom trajectory planning: use the software's " custom trajectory
planning " to generate the trajectory
External motion command: select this item when using the host computer to send the motion track
• Limitations of Auto Tuning:
Vibration Level
:
The maximun torque vibration value that the servo system needs to be met
when in auto tuning process. The larger the set value, the higher the system stiness after auto
tuning is nished.
Positioning Error
:
The maximum position following error that the servo system needs to be
met.The smaller the set value, the higher the system stiness after auto tuning is nished.
Setting Time
:
The longest positioning setting time that the servo system needs to be met. The
smaller the set value, the higher the system stiness after auto tuning is nished.
The default value of those parameters above can be used for most applications, they don't
need to be set unless excellent stiness and system response are needed. Note that too
extreme conditions may cause servo system vibration easily and unstable.
Step 5: Start the Auto Tuning
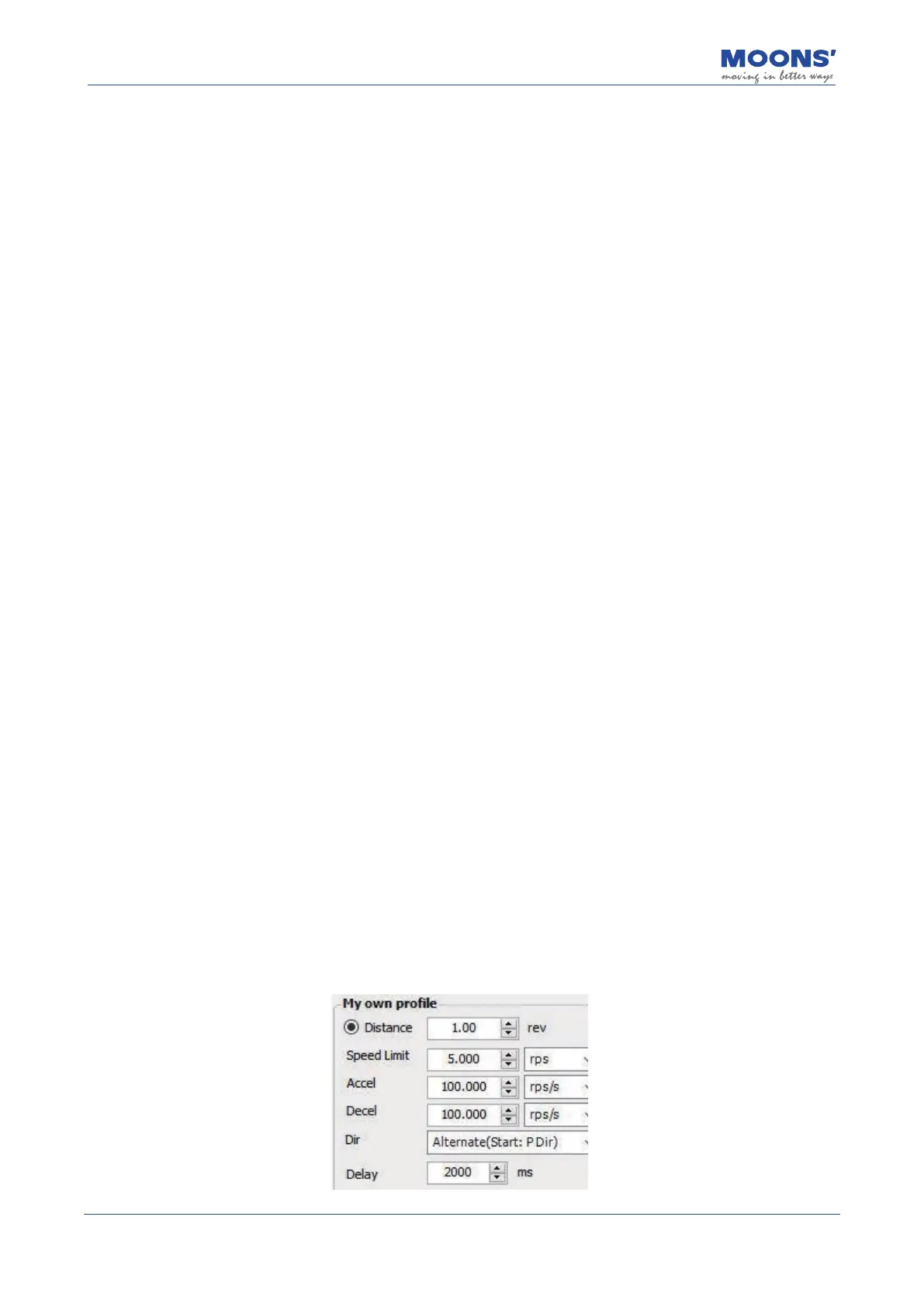
After the above congurations are set, set the motion prole that meets the following conditions,
and then click the "Start Auto Tuning" button to start the tuning process. The source of motion
command can be choose by "My own prole" or "Outer motion prole".
Required Motion Prole
:
Travel Time
:
> 0.5 seconds
Travel Speed
:
> 180 rpm
Acc./Dec.
:
> 30rps/s
Interval Time
:
> 1.5 seconds
• Use external motion command
Click the " Start Auto-Tuning " button, and use the host computer to send motion commands
directly.
• Custom trajectory planning
Users can also use custom trajectory planning. Set a reasonable motion trajectory according to the
above motion conditions, and click the " Start Auto-Tuning " button.