90
Rev. 2.0
07/27/2023
MBDV Hardware Manual
7.5.1.4 Torque limiting via TQ-LMT input (same limit value for forward and reverse
directions)
When P1-10 =3, the forward and reverse torque limit is determined by the logic state of the torque limit
input TQ-LMT.
◆
Users will need to congure the logic of the TQ-LMIT input according to their application (normally open/
closed). However, when the primary TQ-LMT logic state is established (valid), forward and reverse torque
limits are dened by P1-06. If the primary TQ-LMT logic state is not established (invalid), forward and reverse
torque limits are dened by P1-25.
◆
Users will need to congure the logic of the
TQ-LMIT input according to their application (normally open/
closed). However
, when the primary TQ-LMT logic state is established (valid), forward and reverse torque
limits are dened by P1-06. If the primary TQ-LMT logic state is not established (invalid), forward and reverse
torque limits are dened by P1-25.
Related parameters
Parameter Instruction Name Value range Defaults Unit Description
P1-06 CC First torque limit 0~3000 3000 0.1% First torque limit of the motor
P1-25 CY Second torque limit 0~3000 3000 0.1% Second torque limit for motor
Note: If torque limits are set too low, there may be insucient torque available for acceleration and
deceleration.
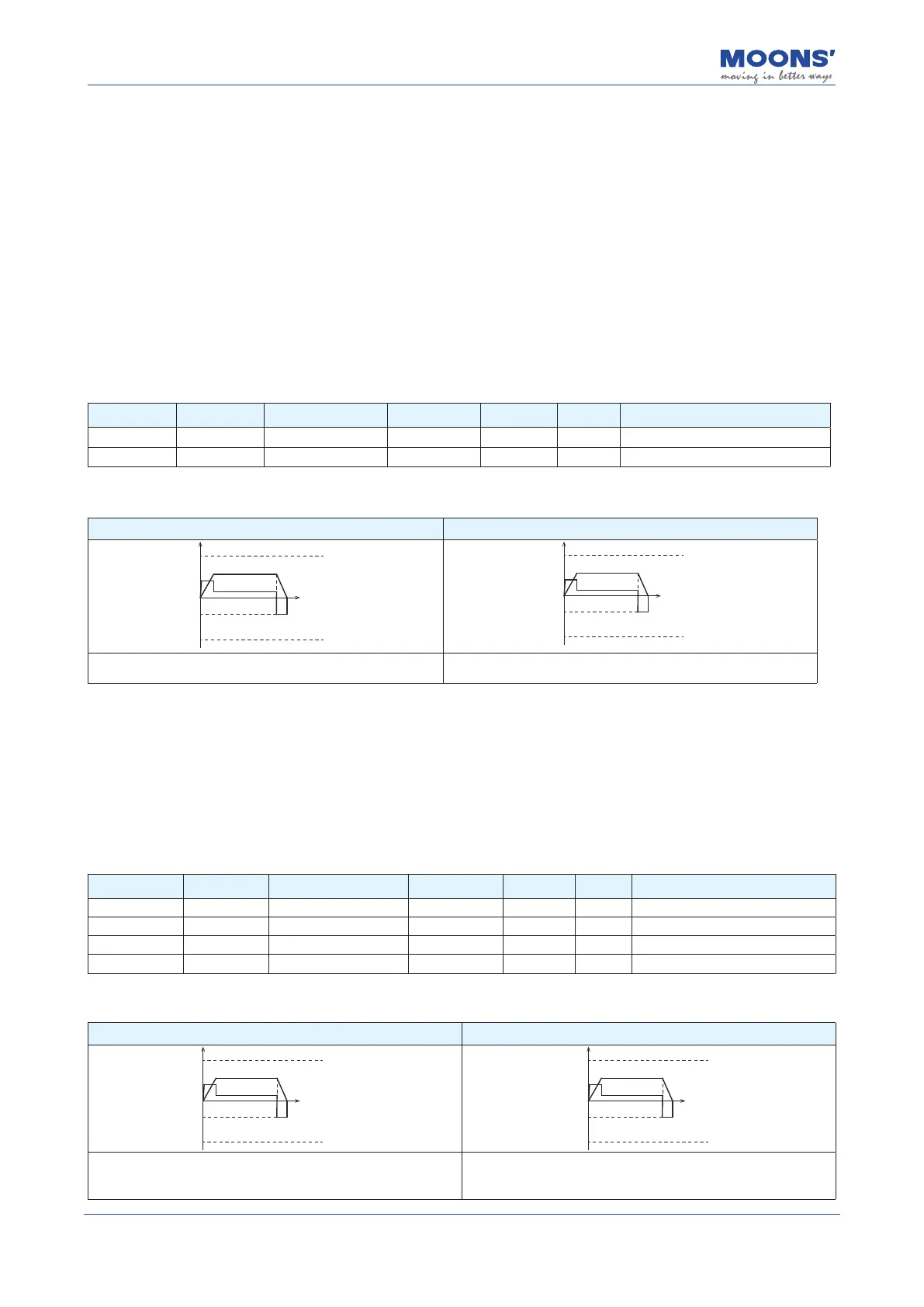
TQ-LMT input valid TQ-LMT input invalid
P1-06
-P1-06
Time
Motor Maximum Torque
Motor maximum torque
P1-25
-P1-25
Time
Motor Maximum Torque
Motor maximum torque
When P1-10 = 3 and the TQ-LMT input is valid, the forward
and reverse torque limits are dened by P1-06.
When P1-10 = 3 and the TQ-LMT input is invalid, the forward and
reverse torque limits are dened by P1-25.
7.5.1.5 Torque limiting via TQ-LMT input (forward and reverse limits assigned diering values)
When P1-10=5, the forward and reverse torque limits are determined by the logic state of the TQ-LMT input.
Users will need to congure the primary logic of the TQ-LMT beforehand (normally open/closed). Regardless
of which logic they choose, when the TQ-LMT input is valid or invalid, based on the selected logic, the
forward and reverse limits can be assigned dierent values from one another in each state of the TQ-LMT
input. This means users will have 2 possible limits in the forward direction and 2 possible limits in the reverse
direction.
Related parameters
Parameter Instruction Name Value range Defaults Unit Description
P1-06 CC First torque limit 0~3000 3000 0.1% First torque limit of the motor
P1-25 CX Second torque limit 0~3000 3000 0.1% Second torque limit for motor
P1-26 CY Third torque limit 0~3000 3000 0.1% Third torque limit for motor
P1-27 CZ Fourth torque limit 0~3000 3000 0.1% Fourth torque limit for motor
Note: If torque limits are set too low, there may be insucient torque available for acceleration and
deceleration.
TQ-LMT torque limit input valid TQ-LMT torque limit input is invalid
P1-06
-P1-25
Time
Motor Maximum Torque
Motor maximum torque
P1-26
-P1-27
Time
Motor Maximum Torque
Motor maximum torque
When P1-10 = 5. The TQ-LMT torque limit input is invalid, the
motor output forward torque is limited to the set value of P1-06,
and the reverse torque is limited to the set value of P1-25.
When P1-10 = 5. The TQ-LMT torque limit input is valid, the motor
output forward torque is limited to the set value of P1-26, and the
reverse torque is limited to the set value of P1-27