6-23
The speed limit value is set by the input voltage to frequency reference (voltage) terminal 13.
When frequency reference (current) terminal 14 has been set to frequency reference by setting
parameter H3-09 to 1F, this terminal is also used as an input terminal for the speed limit.
In
this case, the actual speed limit value
is the sum of the voltage input value at terminal 13 and the
current input value at terminal 14.
The
polarity of the speed limit signal and the direction of the run command determine the direction
in which the speed is limited, as shown in the following table.
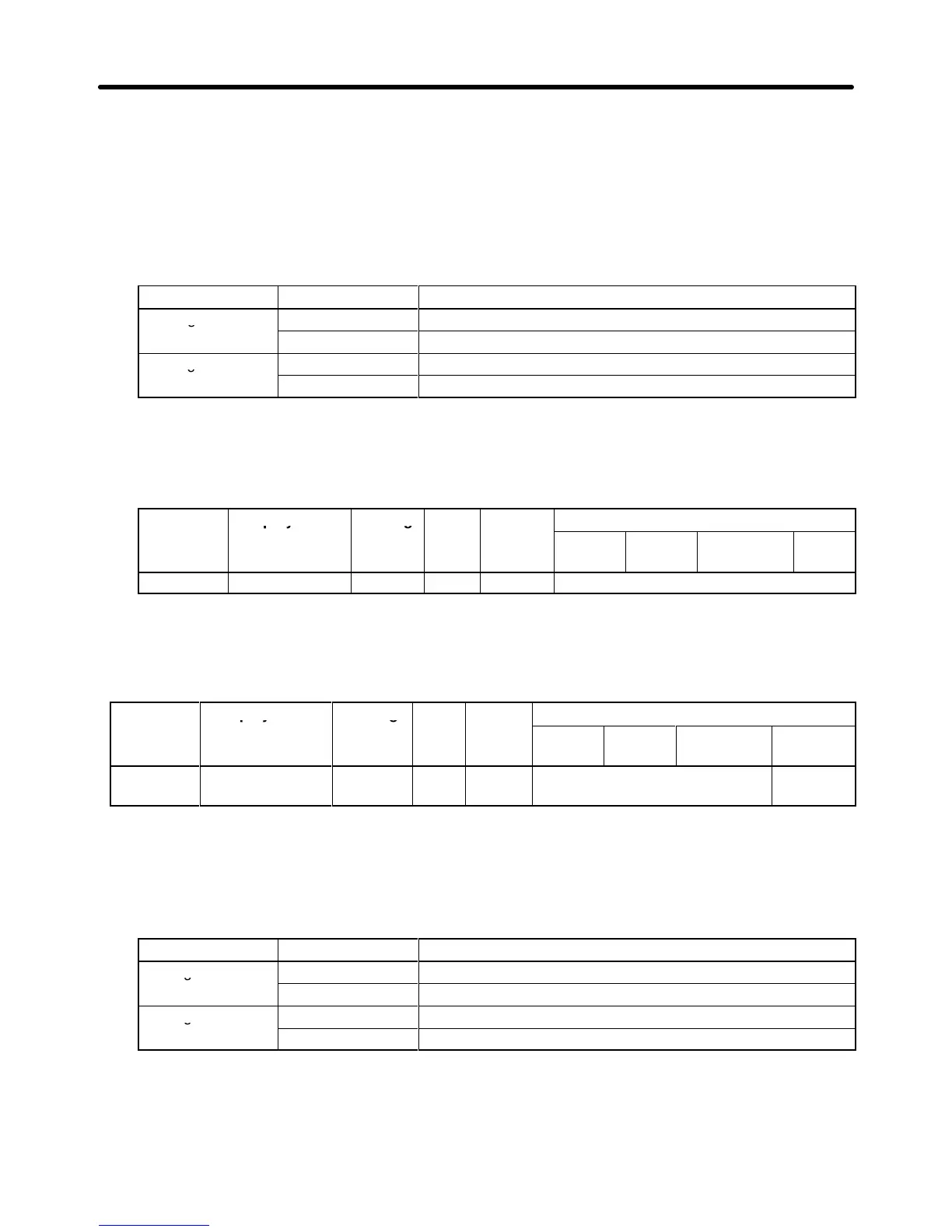
Signal polarity Run command Speed limit direction
+Voltage input
Forward rotation Speed is limited in the forward direction.
Reverse rotation Speed is limited in the reverse direction.
–Voltage input
Forward rotation Speed is limited in the reverse direction.
Reverse rotation Speed is limited in the forward direction.
The speed limit value is zero for rotation opposite to the speed limit direction.
For
example, when a +voltage is being input and the forward rotation command is ON, the ef
fec-
tive
range of the torque control is from zero to the speed limit value in the forward direction (when
parameter d5-05, the speed limit bias, is set to 0).
Parameter Display name Setting Units Default
Valid access levels
number
range setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
H3-01 Term 13 Signal 0 or 1 --- 0 Basic or Advanced
Note Set
the signal level to match the speed limit voltage being input. (This parameter cannot be
changed during operation.)
• Limit with Parameter Setting (d5-03 = 2)
Parameter Display name Setting Units Default
Valid access levels
number
range setting
V/f
Control
V/f with
PG
Open Loop
Vector
Flux
Vector
d5-04 Speed Lmt Value –120 to
+120
% 0 Not applicable. Advanced
Note This parameter cannot be changed during operation.
Set the speed limit as a percentage of the maximum frequency. (The max. frequency is 100%.)
The
sign of the parameter setting and the direction of
the run command determine the direction in
which the speed is limited, as shown in the following table.
Sign of d5-04 Run command Speed limit direction
Setting +
Forward rotation Speed is limited in the forward direction.
Reverse rotation Speed is limited in the reverse direction.
Setting –
Forward rotation Speed is limited in the reverse direction.
Reverse rotation Speed is limited in the forward direction.
The speed limit value is zero for rotation opposite to the speed limit direction.
For
example, when a positive value is set in
d5-04 and the forward rotation command is ON, the
effective
range of the torque control is from zero to the speed limit value in the forward direction
(when parameter d5-05, the speed limit bias, is set to 0).
Advanced Operation Chapter
6