Parker Hannifin
P series User Guide 109
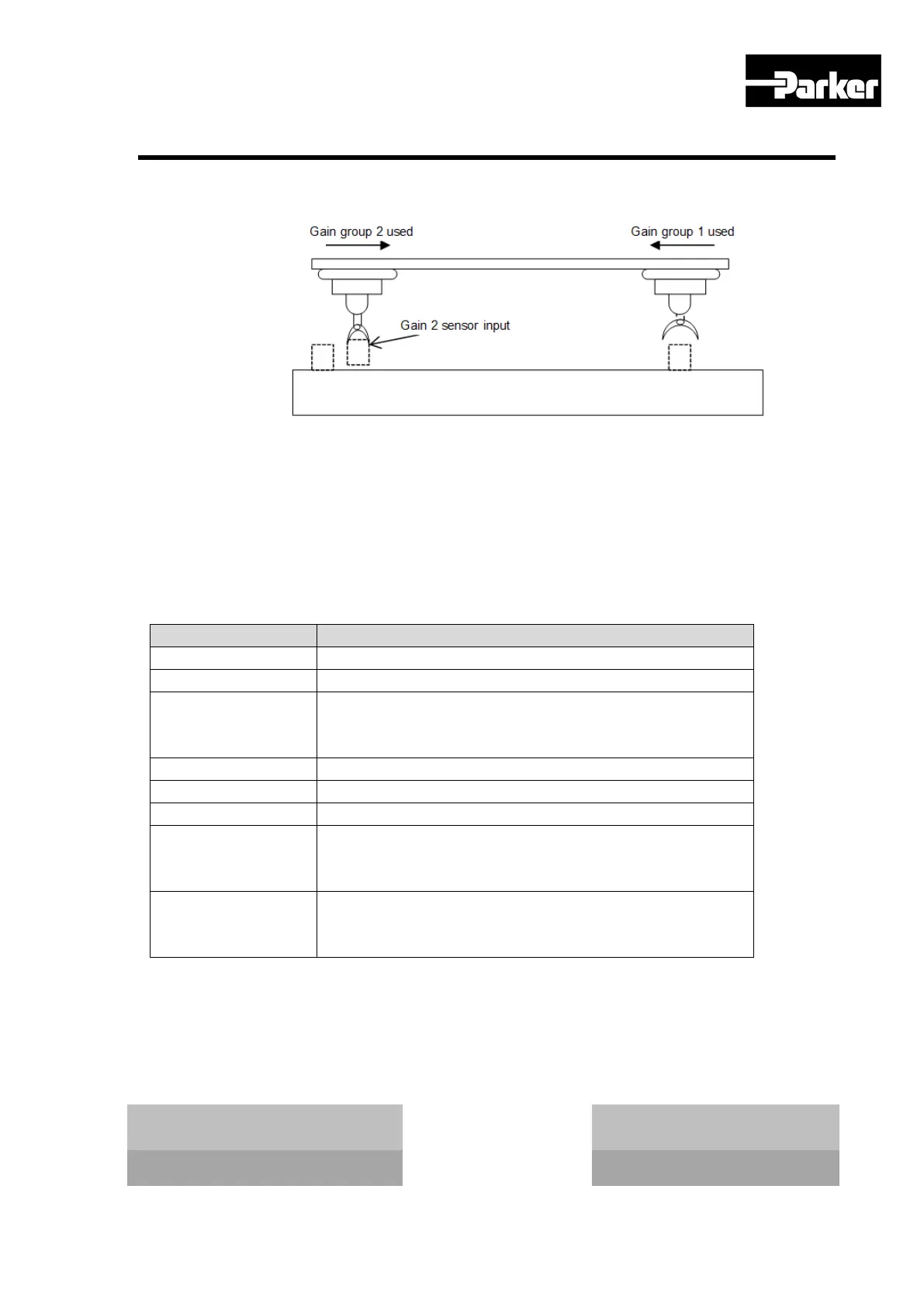
5.9.1 Gain Group Conversion
This function is one of the methods to adjust gains: you can convert gain group 1
and gain group 2. Through such conversion, you can reduce the time required for
position determination.
Gain group consists of position loop gain / speed loop gain / speed loop integral
time constant / torque command filter time constant: you can set the gain
conversion function (0x2119) as follows.
Gain conversion (0x2119) descriptions
Gain conversion based on GAIN2 input status
- 0:use gain group 1
- 1: use gain group 2
Gain conversion based on ZSPD output status
- 0:use gain group 1
- 1: use gain group 2
Gain conversion based on INPOS1output status
- 0:use gain group 1
- 1: use gain group 2
Table 68. Gain Conversion Description
The waiting time and conversion time during gain conversion are as follows.
Gain conversion time
1(0x211A)
Gain conversion waiting
Position loop gain1(0x2101)
Speed loop gain1(0x2102)
Position loop gain2(0x2105)
Speed loop gain2(0x2106)
 Loading...
Loading...






