Parker Hannifin
P series User Guide 156
Table 89. Absolute Encoder Reset Related Objects
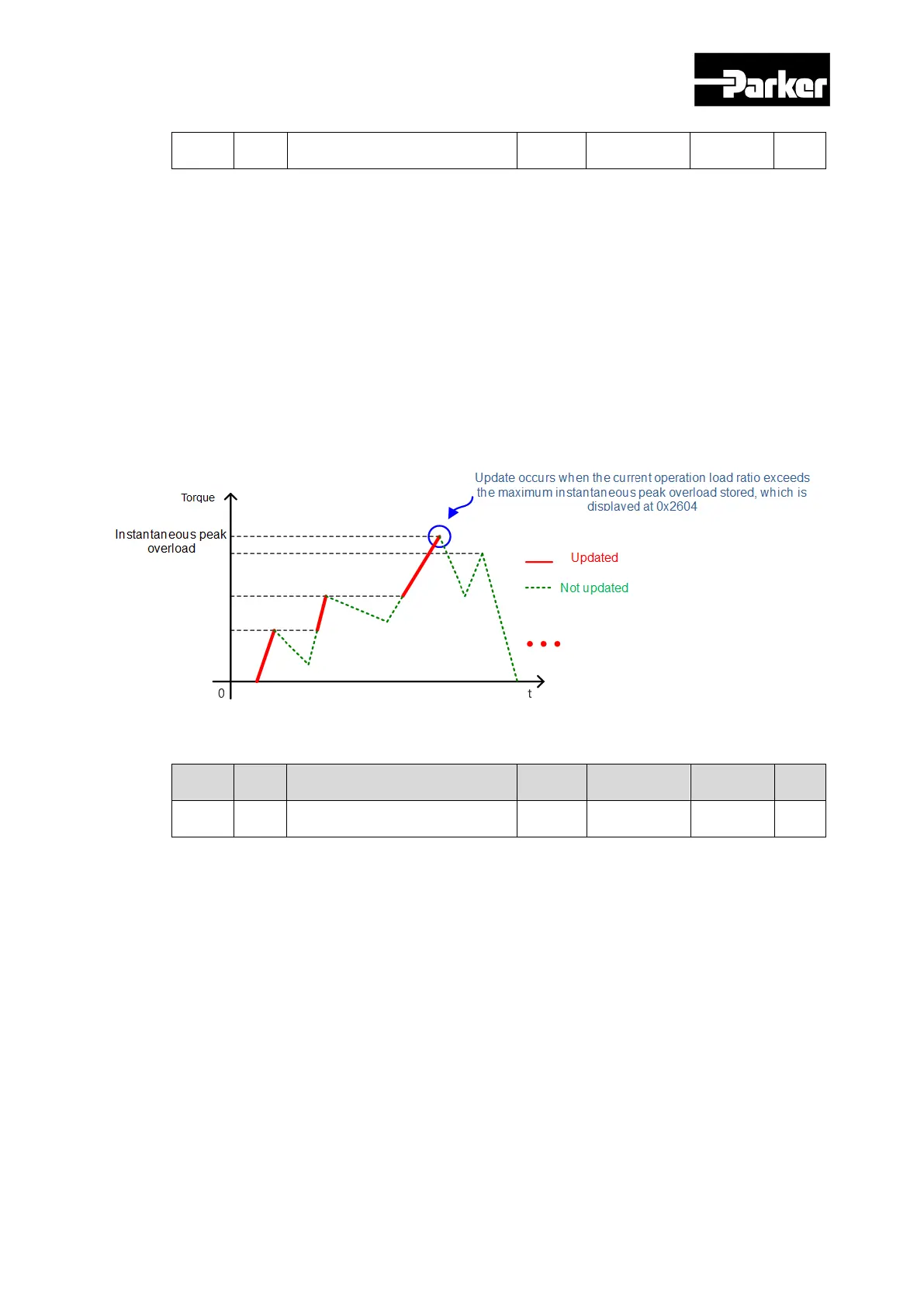
7.1.7 Instantaneous Maximum Torque Reset
Reset the instantaneous maximum overload rate (0x2604) into 0. The instantaneous
maximum overload rate represents the maximum operation overload rate output by the drive
instantaneously.
The peak load from the moment the servo is powered on to the present is displayed in
percentage to the rated output. The unit is [0.1%]. Resupplying power resets the value to 0.
Related Objects
Instantaneous Maximum
Operation Overload
Table 90. Instantaneous Maximum Torque Reset Related Objects
7.1.8 Phase Current Offset Tuning
This function automatically tunes the current offset of Phase U/V/W. Phase current offset
can be adjusted in accordance with the user environment. The product is released with the
offset tuned by default.
The measured Phase U/V/W offset are stored at 0x2015, 0x2016, 0x2017, respectively.
AL-15 occurs when the offset is abnormally large.
 Loading...
Loading...






