Parker Hannifin
P series User Guide 159
8.1.1 Control Methods
PD drives supports Indexing Position method and Pulse Input Position modes. The former
internally generates and controls position command to determine position, and the latter
receives pulse trains from outside and control them.
Indexing Position mode is a position control mode that internally generates position profiles
without external Host controller. To use index function, set the control mode (0x3000)to
‗Index Mode.‘
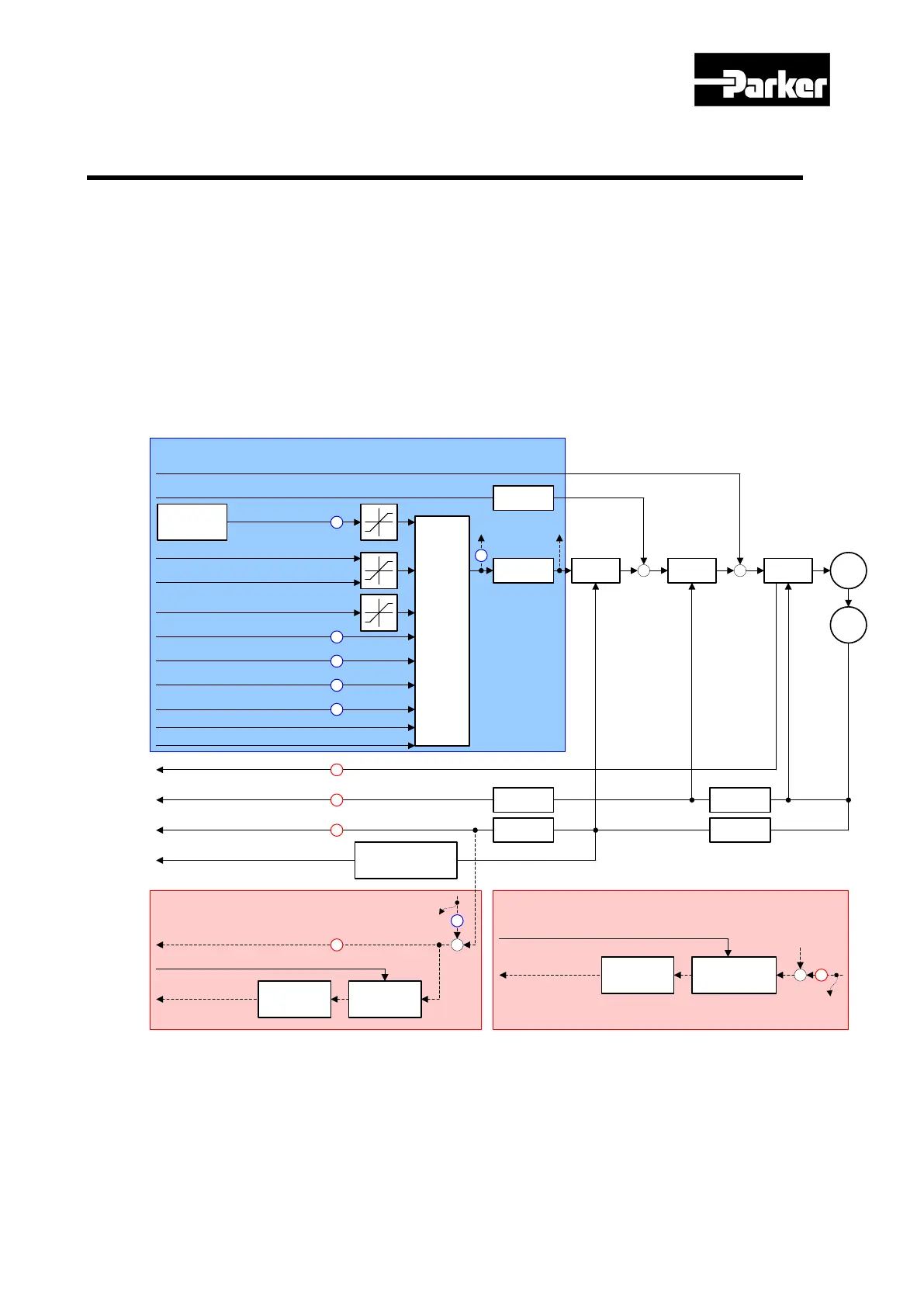
The block diagram of the Indexing Position mode is as follows.
Torque Offset (0x60B2)
Velocity Offset (0x60B1)
Torque Actual Value (0x6077)
Software Min./Max. Position Limit (0x607D:01/02)
Velocity Actual Value (0x606C)
Position Actual Value (0x6064)
Following Error Actual Value (0x60F4)
Trajectory
Generator
Position
Control
Velocity
Control
Torque
Control
+
+
+
+
M
Gear Ratio
Position Demand
Value (0x6062)
Enc.
Velocity
Calculation
Position
Calculation
Gear Ratio
Inverse
Gear Ratio
Inverse
Position Actual Internal
Value (0x6063)
Following Error Window (0x6065)
Following
Error Window
Comparator
Following
Error TimeOut
(0x6066)
Position Demand
Value (0x6062)
C
+
-
Following Error in
Statusword (0x6041.13)
Following Error
Position Demand Internal
Value (0x60FC)
Control Mode : Indexing Position
6
7
8
9
C
Position Window (0x6067)
Position
Reached Window
Comparator
Position
WindowTime
(0x6068)
Trajectory
Generator
ePosition
-
Target Reached in
Statusword (0x6041.10)
Position Reached
8
Position Actual
Value (0x6064)
+
Gear Ratio
Analog Velocity Override Mode (0x221E)
Load Indexing
Buffer
( Index00 ~ 63 )
Coordinate Select (0x3001)
3
Control Mode (0x3000)
Start Index Number(0~63) (0x3008)
4
Modulo Factor (0x240C)
2
Quick Stop Option Code (0x605A)
1
Pulse Output (A/B/Z Phase)
Encorder Output Pulse
Regeneration
Software Position Limit Function Select (0x2400)
Quick Stop Deceleration (0x6085)
5
Figure 52. Indexing Position Operation
 Loading...
Loading...






