Parker Hannifin
P series User Guide 138
6.7.2 Signals Related with Position Control
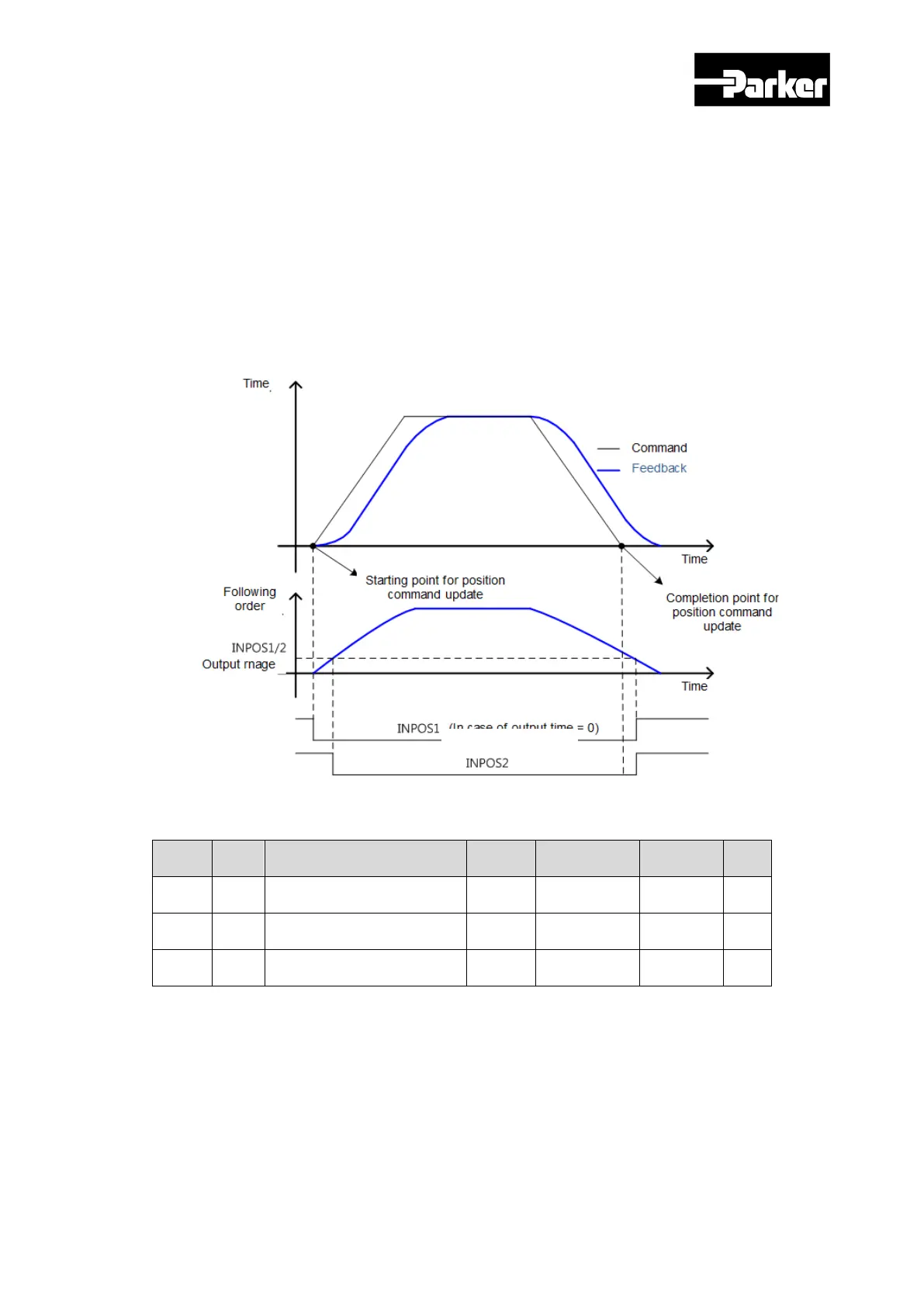
As shown in the figure below, the difference between the position command value from the
host controller and the position feedback value, that is the position error, is under the
INPOS1 output range (0x2401) and is maintained for the duration of INPOS1 output
time(0x2402), the INPOS1(In Position 1) signal is displayed. However, the INPOS1 signal is
displayed only when the position command is not updated.
In addition, regardless whether the position command is updated, the INPOS2 (In Position
2) signal is displayed when the position error is below the INPOS2 output range (0x2403).
Related Objects
Table 80. Position Control Related Objects
(In case of output time =
0)
 Loading...
Loading...






