Parker Hannifin
P series User Guide 171
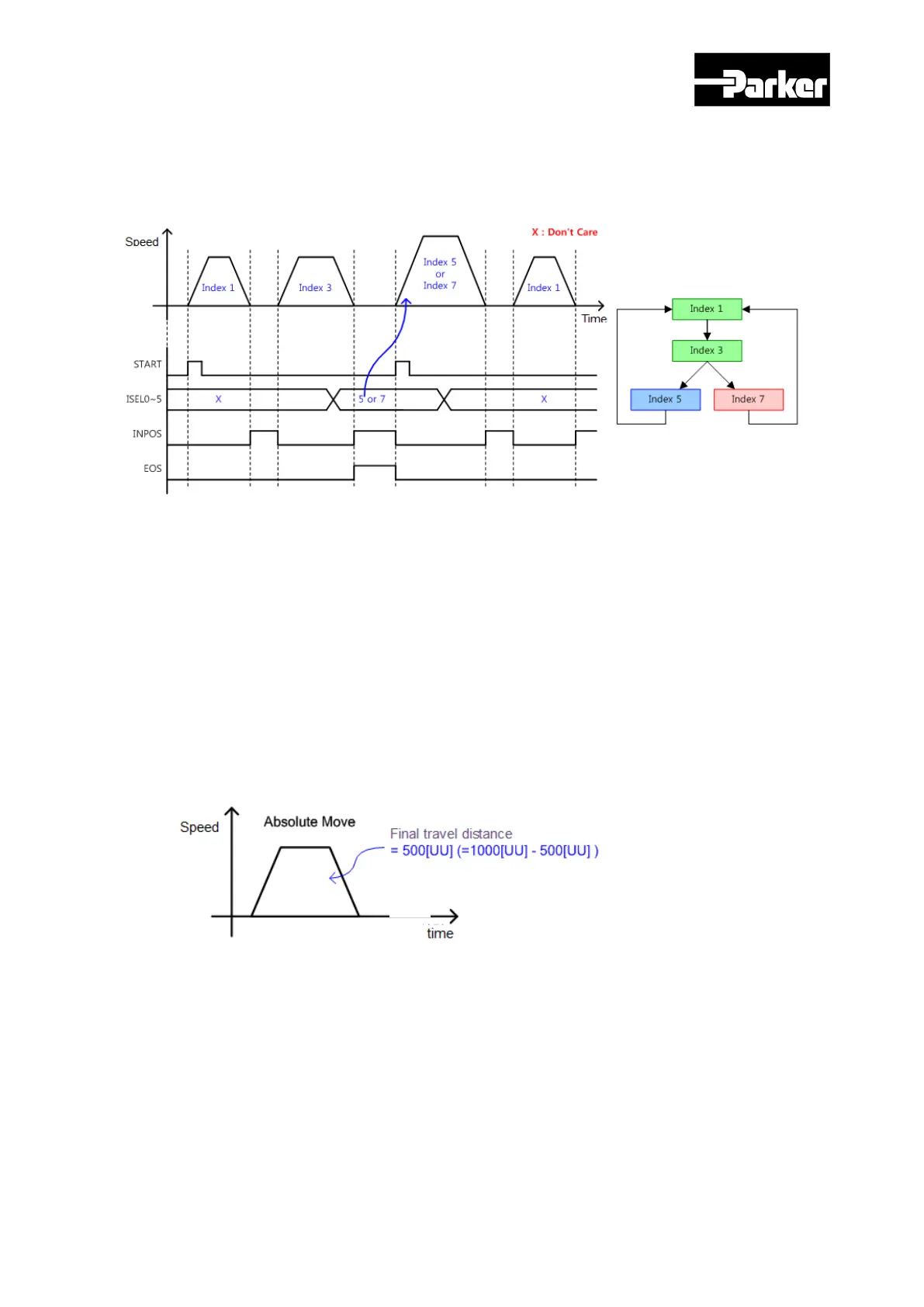
By combining the Wait for Start signal and the Next Index signal, a bifurcation
structure shown in the figure below can be constructed.
To do this, the action of the index 3 should be set to Wait for Start.
8.2.2 Absolute and Relative Move
This is the most basic Point-to-Point (PTP) operation method where the motor rotates to the
absolute or relative position based on the set speed and acceleration.
Absolute Move
The final distance is the difference between the distance and the current position.
Example) Absolute move when current position = 500 and Distance = 1000
Relative Move
The final distance is the input value of the distance.
Example) Relative move when current position = 500 and Distance = 1000
 Loading...
Loading...






