Parker Hannifin
P series User Guide 110
Speed loop integral time
constant 1(x2103)
Torque command filter time
constant 1(0x2104)
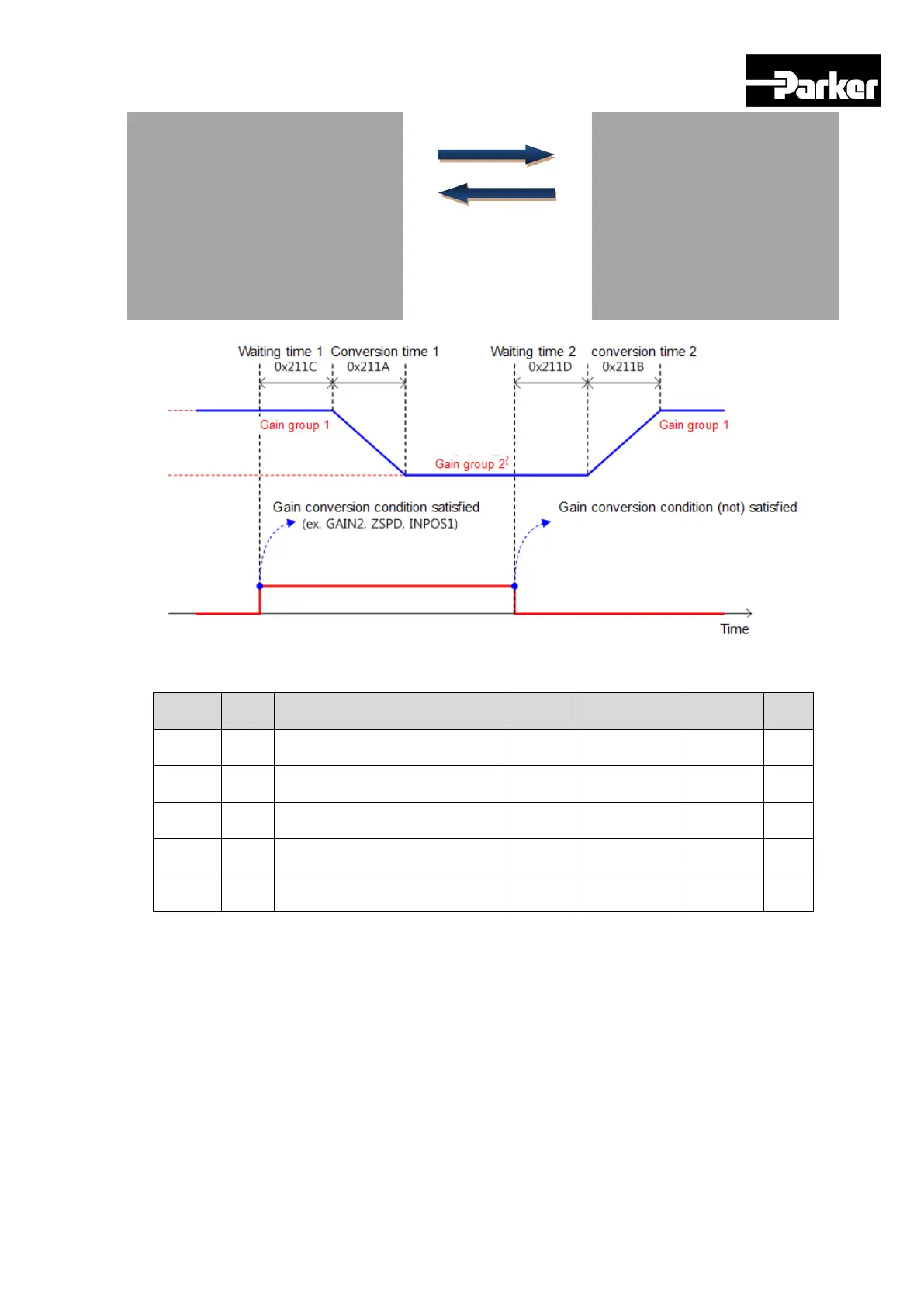
time1(0x211C)
Gain conversion time
2(0x211B)
Gain conversion waiting
time2(0x211D)
Speed loop integral time
constant 2(x2107)
Torque command filter time
constant 2(0x2108)
Related Objects
Gain Conversion Waiting Time 1
Gain Conversion Waiting Time 2
Table 69. Gain Conversion Related Objects
5.9.2 P/PI Control Conversion
PI control uses both proportion (P) gain and integral (I) gain of the speed controller.
P control refers to control using only proportion gain.
Proportion gain determines the response of the overall controller, and the integral
gain is used to remove the error of the steady state. Excessive integral gain leads to
overshoot during acceleration/deceleration.
 Loading...
Loading...






