Parker Hannifin
P series User Guide 112
Related Objects
P/PI Control Conversion Mode
P Control Switch Acceleration
P Control Switch Following
Error
Table 70. P/PI control Related Objects
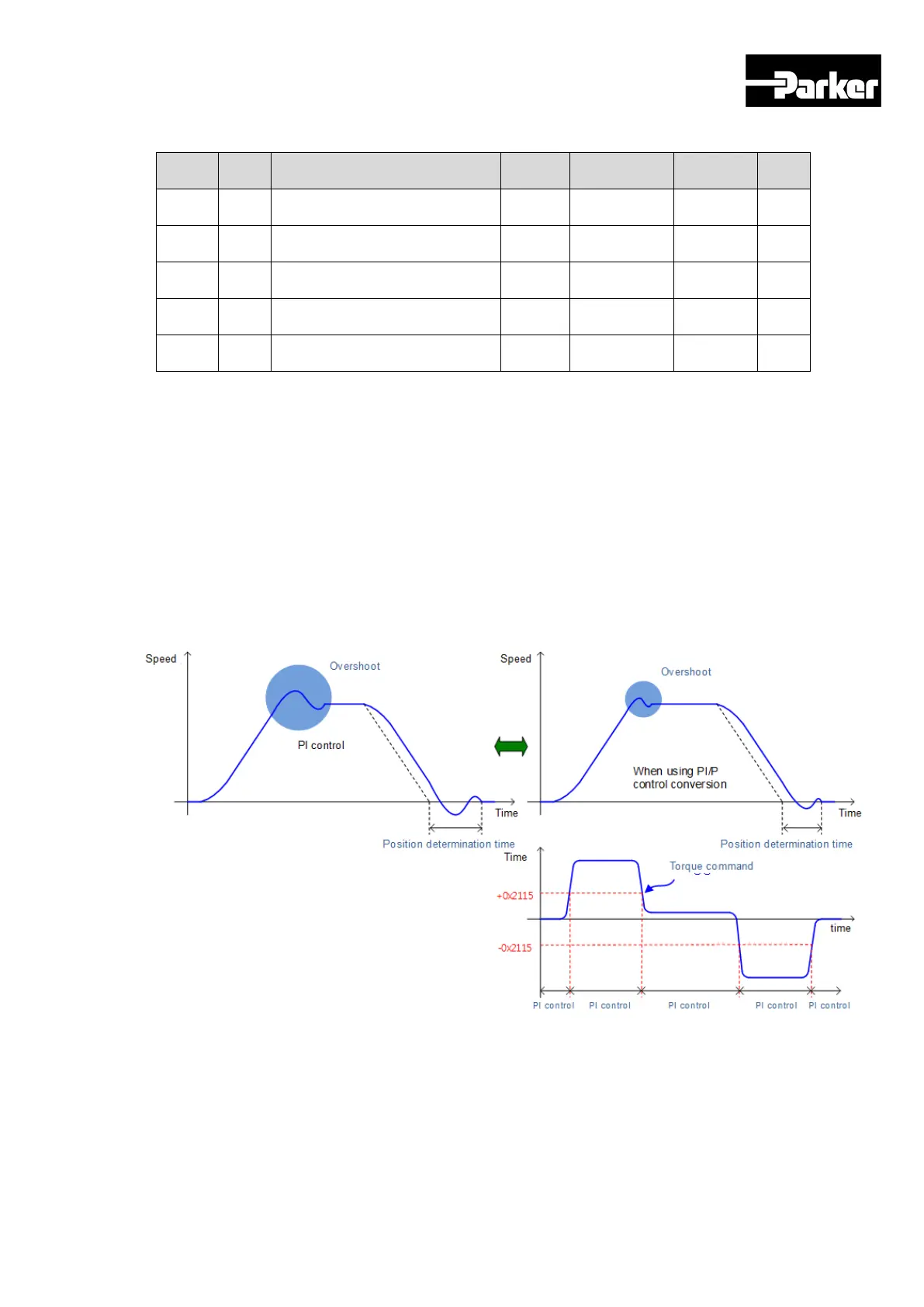
Example of P/PI conversion by torque command
Using PI control at all times without using P/PI conversion during speed control results
in accumulation of the integral term during acceleration/deceleration, which in turn
results in overshoot and longer position determination time. By using appropriate P/PI
conversion mode, you can reduce the determination time. The figure below shows an
example of conversion mode by torque command.
Figure 39. Example of P/PI Conversion
 Loading...
Loading...






