Parker Hannifin
P series User Guide 132
Electronic gears are generally used for the following purposes.
When driving loads based on the user unit.
- You can give command based on the user unit, regardless of the encoder (motor) type.
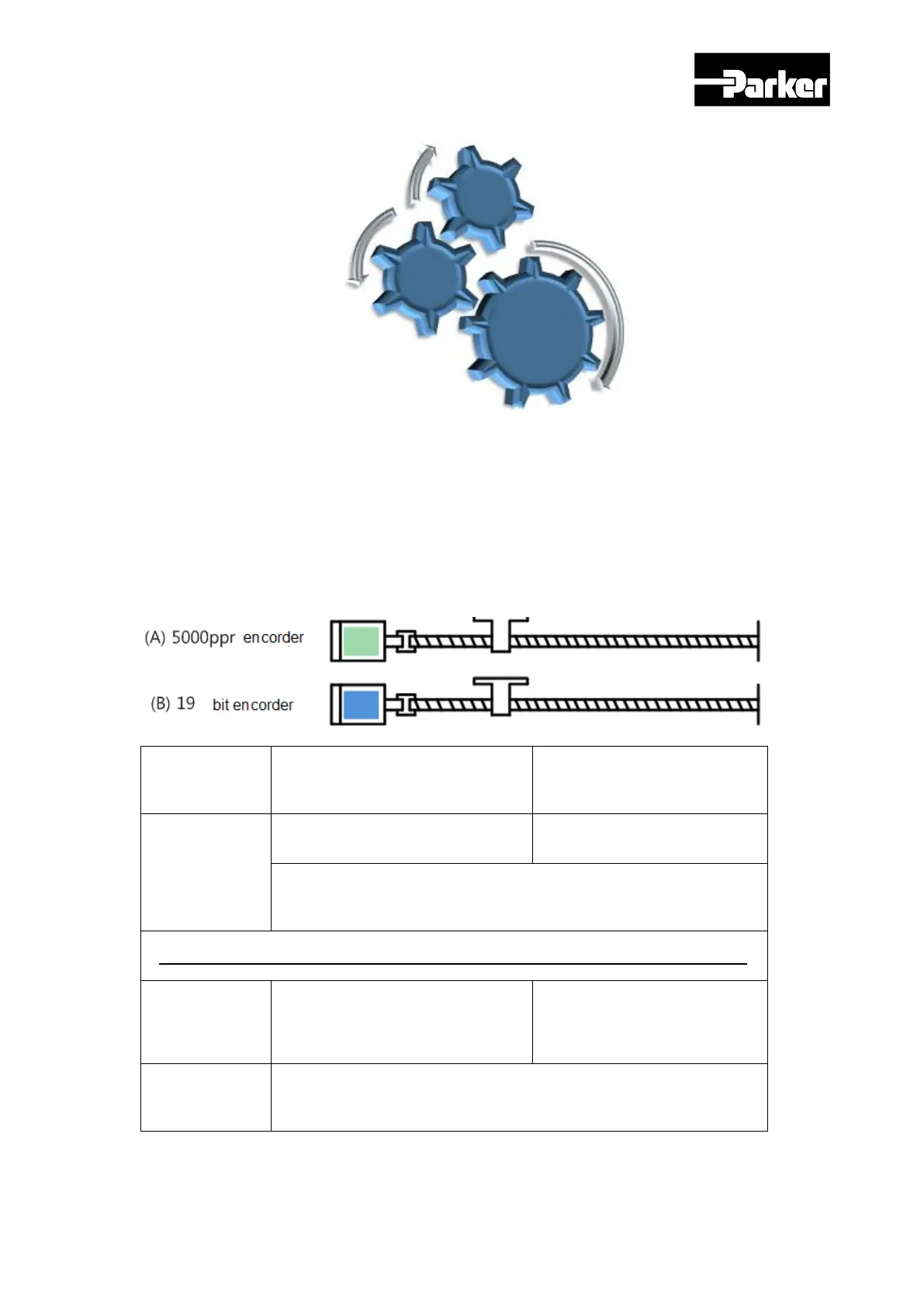
The table below shows comparison between 5000ppr encoder and 19bit encoder, when
moving 12mm using the same 10mm-pitch ball screw.
(B) 19bit (524288 ppr)
Encoder
Different commands should be given to each encoder (motor) when
moving the same distance
When giving command based on the minimum unit (user unit) of 1um(0.001mm)
Motor Revolutions =5000
Shaft Revolutions = 10000
Motor Revolutions =524288
Shaft Revolutions = 10000
You can give the same command to move 12000(12mm=
12000*1um) regardless of the encoder (motor) type.
 Loading...
Loading...






