Parker Hannifin
P series User Guide 163
The control mode (0x3000) must be set to linear coordinate when performing the 6
PTP position controls below.
A. Absolute Move
The final moving distance under the absolute move mode is the difference
between the current position and the target distance.
B. Relative Move
The final moving distance under the relative move mode is the target
distance.
C. Registration Absolute Move
The speed and distance changes to the registration speed and speed by the
REGT signal input from outside during operation to the target position: the
target position (absolute value) changes to the new target position during
operation to the existing target position.
D. Registration Relative Move
The speed and distance changes to the registration speed and speed by the
REGT signal input from outside during operation to the target position: the
target position (relative value) changes to the new target position during
operation to the existing target position.
E. Blending Absolute Move
When receiving a new position command during operation to the target
position, the operation to the new target position (absolute value) begins
after reaching the original position
F. Blending Relative Move
When receiving a new position command during operation to the target
position, the operation to the new target position (relative value) begins after
reaching the original position
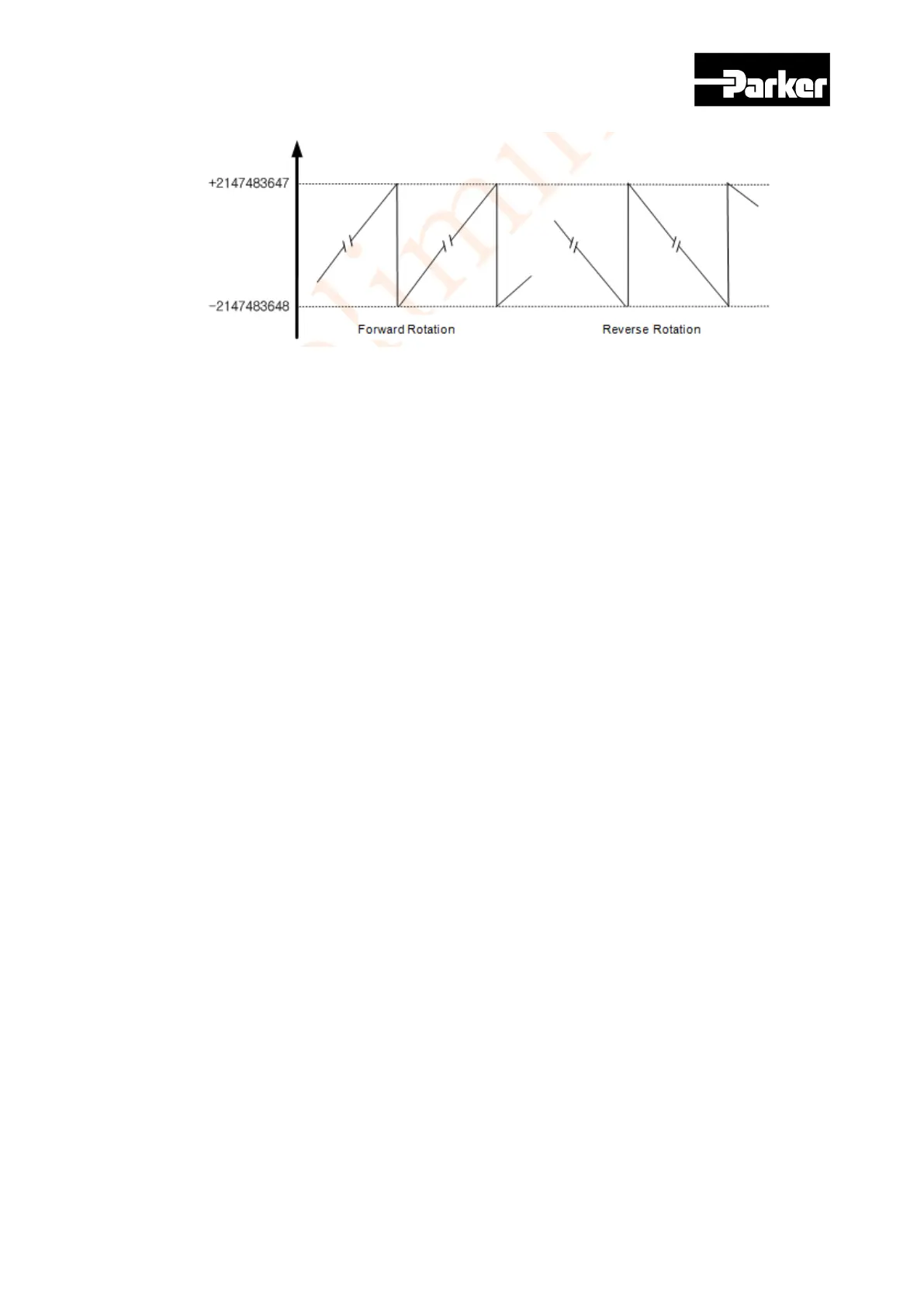
Rotary Coordinate Method
The rotary coordinate expresses position values only in positive values. The
expressed range depends on the set value of the modulo factor, within the range of
0 ~ (Modulo Factor-1).
 Loading...
Loading...






