Parker Hannifin
P series User Guide 167
Acceleration, Deceleration
This sets the acceleration and deceleration when operating index. The product
supports asymmetrical acceleration/deceleration operation, where the acceleration
and deceleration are different from each other.
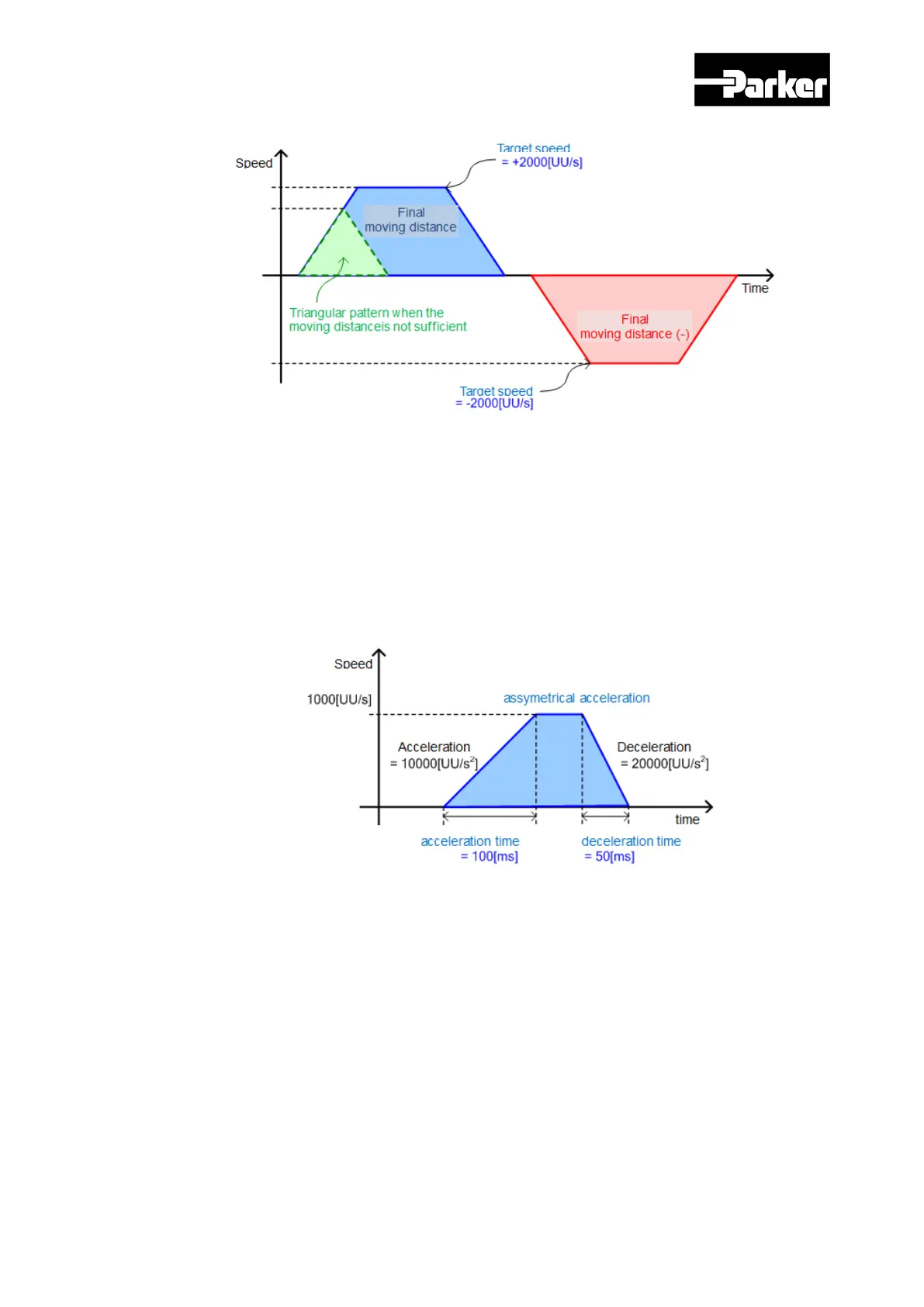
As shown in the figure below, when Speed = 1000[UU/s], Acceleration =
10000[UU/s
2
], Deceleration = 20000[UU/s
2
], the time to accelerate to the target
speed is 100[ms] (=1000[UU/s]/10000[UU/s
2
] ), and the deceleration time is 50[ms] =
( 1000[UU/s] /20000[UU/s
2
] ).
Registration Distance, Registration Speed
If the index type is Registration Absolute or Registration Relative, the operation speed
and distance can be changed by REGT signal input from outside.
The distance after REGT signal input is determined by the Registration Distance.
The meaning of registration distance and registration speed is as follows.
A. Registration Distance
Means the distance (Unit: UU) after the REGT signal input.
B. Registration Speed
Means the target speed (Unit: UU/s) for movement after the REGT signal input.
 Loading...
Loading...






