Function Manual
01/2017
123
● MD32530 $MA_FRICT_COMP_CONST_MIN (minimum compensation value)
Note
If satisfactory results cannot be obtained for very small path velocities, the computational resolution may have to be
increased:
MD10200 $MA_INT_INCR_ PER_MM (computational resolution for linear positions)
• MD10210 $MA_INT_INCR_PER_DEG (computational resolution for angular positions)
Compensation value for short traversing blocks
The compensation value determined for the quadrant error compensation can lead to overcompensation in short traversing
blocks. The overcompensation can be avoided by reducing the compensation value specifically for traversing blocks that are
traversed within one interpolation cycle. However, the size of the reduction is a value that must be determined empirically as
it depends to a large extent for every axis on the particular situation at the machine. A percentage of the compensation value
determined in the circularity test is set via the machine data:
MD32580 $MA_FRICT_COMP_INC_FACTOR (compensation value for short traversing blocks)
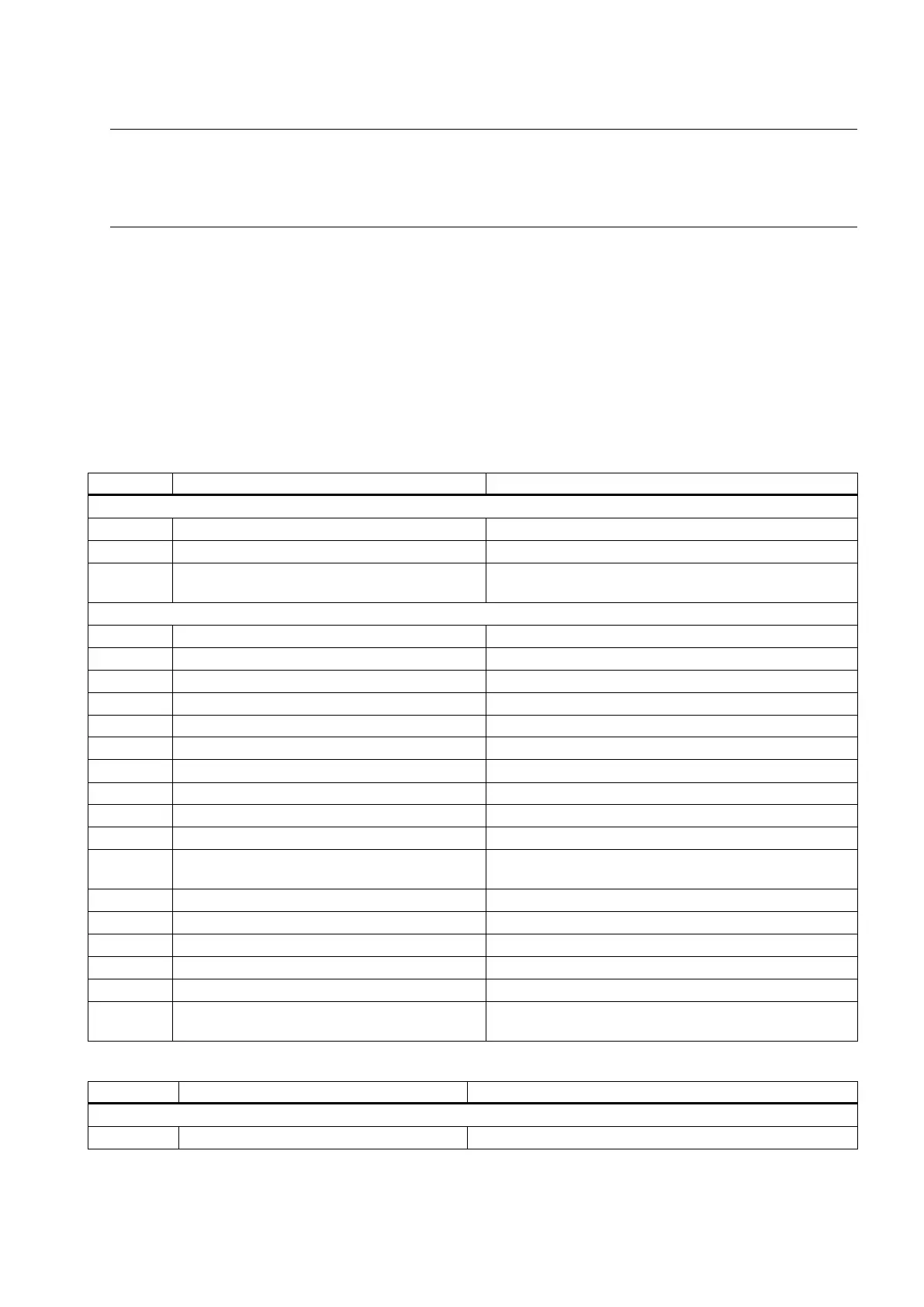
10200 INT_INCR_PER_MM Computational resolution for linear positions
Computational resolution for angular positions
18342 MM_CEC_MAX_ POINTS[t] Maximum number of interpolation points of sag compen-
sation
Type of friction compensation
Friction compensation active
Friction compensation adaptation active
Maximum friction compensation value
Minimum friction compensation value
Friction compensation time constant
Adaptation acceleration value 1
Adaptation acceleration value 2
Adaptation acceleration value 3
32580 FRICT_COMP_INC_FACTOR Weighting factor for friction compensation value for short
Feedforward control can be activated from the program
Interpolatory compensation active
Enabling of sag compensation
EQUIV_SPEEDCTRL_TIME[0]...[5]
Equivalent time constant of the speed control loop
36500 ENC_CHANGE_TOL Backlash compensation partial section
38000 MM_ENC_COMP_MAX_POINTS[0] Interpolation points for encoder/spindle compensation
(LEC ) (for display only)
Enable evaluation of beam sag compensation table

 Loading...
Loading...


















