Function Manual
01/2017
37
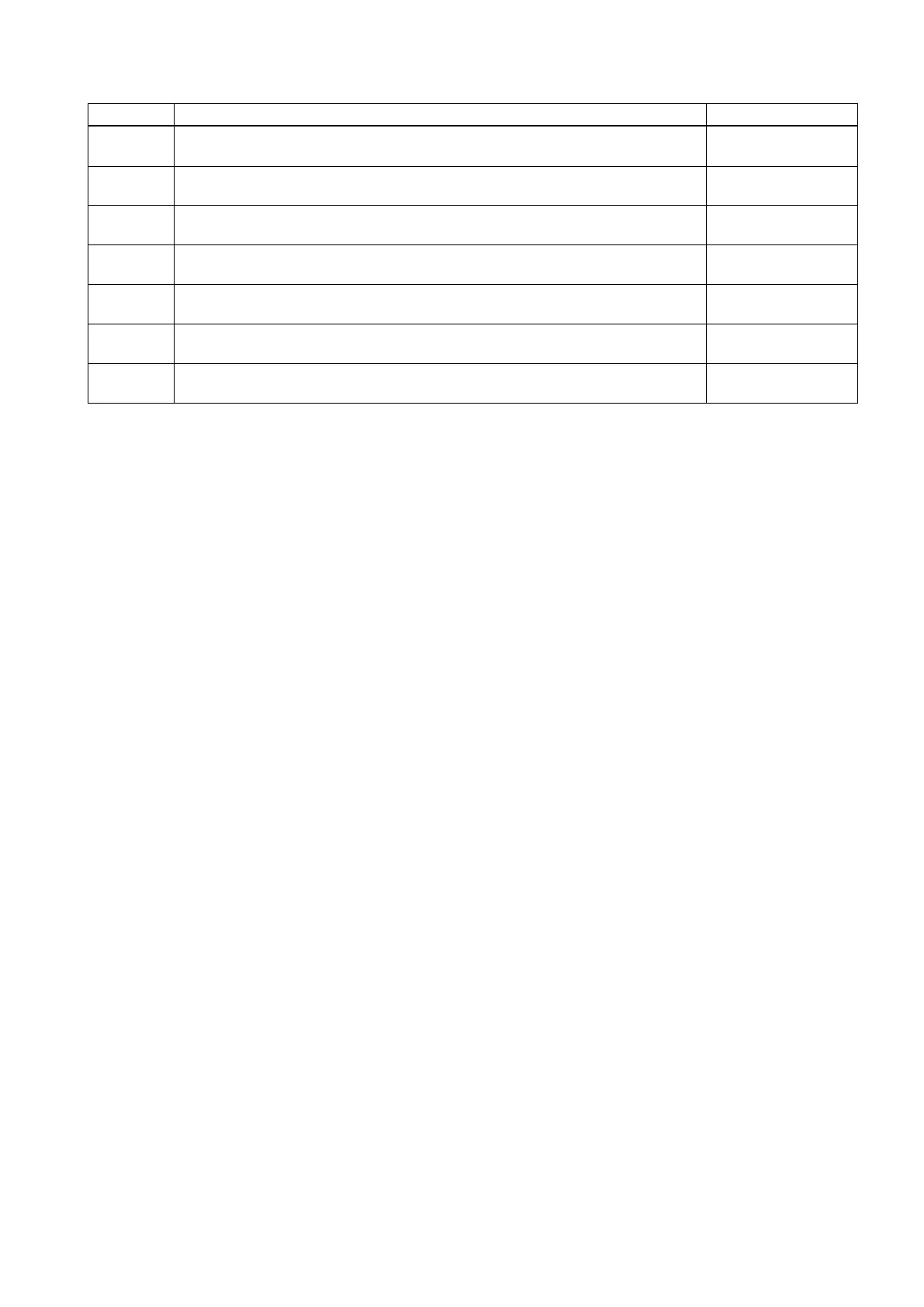
MD20490 $MC_IGNORE_OVL_FACTOR_FOR_ADIS
(G641/G642 irrespective of the overload factor)
1
MD28520 $MC_MM_MAX_AXISPOLY_PER_BLOCK
(maximum number of axis polynomials per block)
3
MD28530 $MC_MM_PATH_VELO_SEGMENTS
(number of memory elements for limiting the path velocity)
5
MD28540 $MC_MM_ARCLENGTH_SEGMENTS
(number of memory elements for displaying the arc length function)
10
MD28060 $MC_MM_IPO_BUFFER_SIZE
(number of NC blocks for the block preparation)
100
MD28070 $MC_MM_NUM_BLOCKS_IN_PREP
(number of blocks for the block preparation)
60
MD32310 $MA_MAX_ACCEL_OVL_FACTOR
(overload factor for axial velocity jumps)
<Value for G64 opera-
Compressor functions are activated using the modal G commands COMPON, COMPCURV or COMPCAD.
To further improve the surface quality, the functions G642 (rounding function) and SOFT (jerk limitation) can be used. The
commands must be written together at the beginning of the program.
Example:
Activating the COMPCAD compressor
N20 G01 X... Y... Z... F...
Traversing blocks 1 ... n
Deactivation of the compressor
All compressor functions are deactivated using the COMPOF command.
The programming of the compressor functions is described in:
SINUMERIK 808D/SINUMERIK 808D ADVANCED Programming and Operating Manual (Milling)
LookAhead is a procedure in continuous path mode (G64) that achieves velocity control with LookAhead over several NC
part program blocks beyond the current block.
Without LookAhead: If the program blocks only contain very small paths, a velocity per block is achieved that permits
deceleration of the axes at the block end point without violating acceleration limits. This means that the programmed velocity
was not actually reached although a sufficient number of prepared blocks with virtually tangential path transitions were
available.
With the LookAhead function: It is possible to plan the acceleration and deceleration phase with approximately tangential
path transitions over several blocks in order to achieve a higher feedrate with shorter distances. Deceleration to velocity
limits is possible with LookAhead such that violation of the acceleration and velocity limit is prevented.

 Loading...
Loading...


















