R1: Reference point approach
15.5 Referencing with incremental measurement systems
Basic Functions
1216 Function Manual, 09/2011, 6FC5397-0BP40-2BA0
15.5.5 Phase 3: Traversing to the reference point
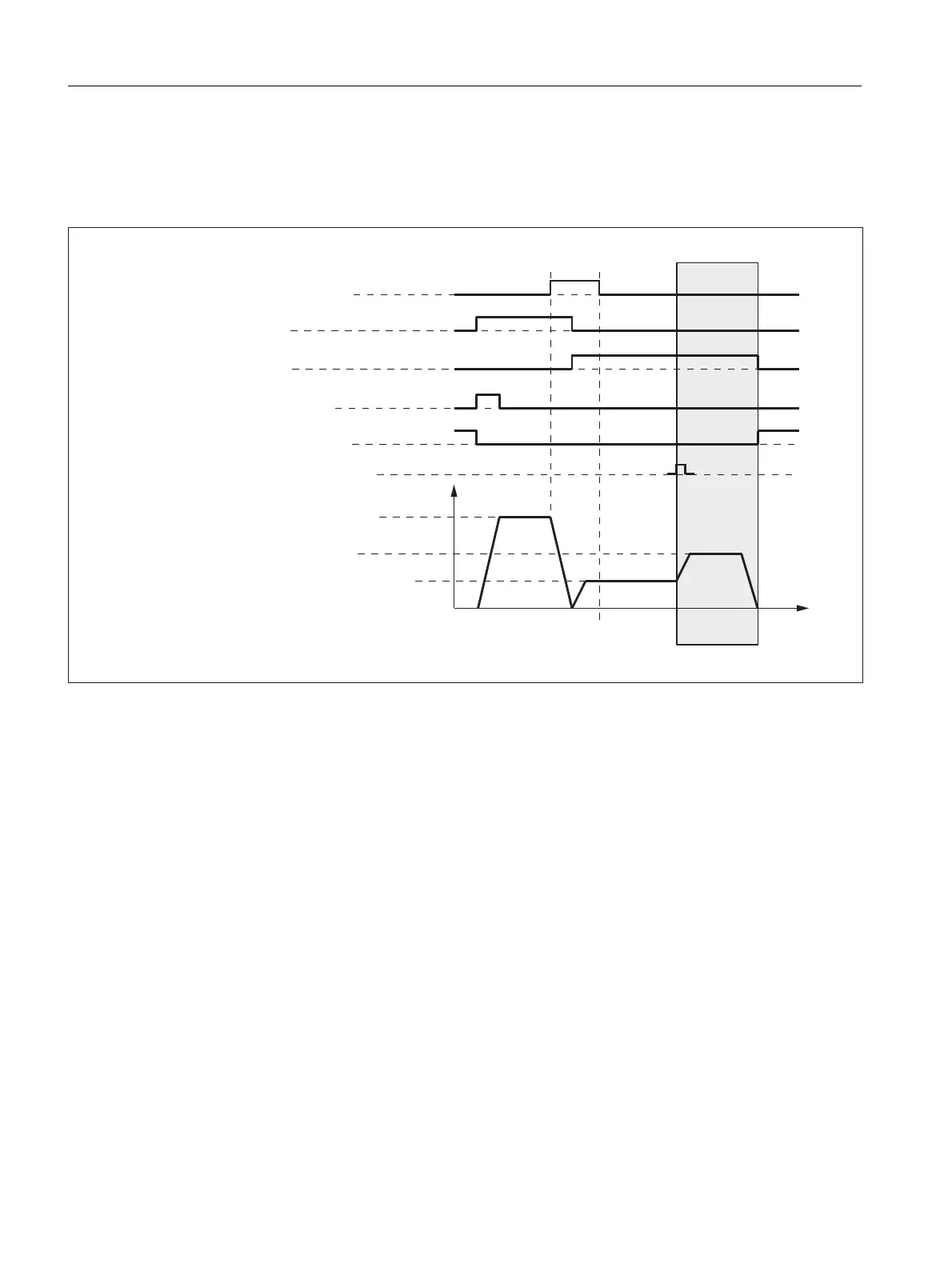
Phase 3: Graphic representation
Figure 15-9 Phase 3: Traversing to the reference point
Phase 3: Start
At the end of phase 2 the machine axis travels at reference point creep velocity. Therefore, as soon as phase 2 is
completed successfully without an alarm, phase 3 is started without interruption.
Initial situation
The encoder zero mark has been detected.
Phase 3: Sequence
The machine axis moves at the assigned reference point positioning velocity:
MD34070 $MA_REFP_VELO_POS (reference point positioning velocity)
from the encoder zero mark detected in Phase 2 to the reference point.
The path s
ref
to be covered is calculated from the sum of the reference point distance plus reference point offset:
MD34080 $MA_REFP_MOVE_DIST (reference point distance)
MD34090 $MA_REFP_MOVE_DIST_CORR (reference point offset)
'%'%;UHIHUHQFHSRLQWDSSURDFKGHFHOHUDWLRQ
'%'%;0RWLRQFRPPDQGSOXV
'%'%;0RWLRQFRPPDQGPLQXV
'%'%;DQGWUDYHUVLQJNH\SOXVPLQXV
'%'%;DQGUHIHUHQFHGV\QFKURQL]HG
=HURPDUNSRVLWLRQPHDVXULQJV\VWHP
9HORFLW\
5()(5(1&(32,17$3352$&+9(/2&,7<
5()(5(1&(32,17&5((39(/2&,7<
5()(5(1&(32,17326,7,219(/2&,7<
3KDVH
W
0'0$B5()3B9(/2B6($5&+B0$5.(5
0'0$B5()3B9(/2B326
0'0$B5()3B9(/2B6($5&+B&$0

 Loading...
Loading...














