K2: Axis Types, Coordinate Systems, Frames
10.1 Brief description
Basic Functions
Function Manual, 09/2011, 6FC5397-0BP40-2BA0
687
10.1.3 Frames
Frame
A frame is a closed calculation rule (algorithm) that translates one Cartesian coordinate system into another.
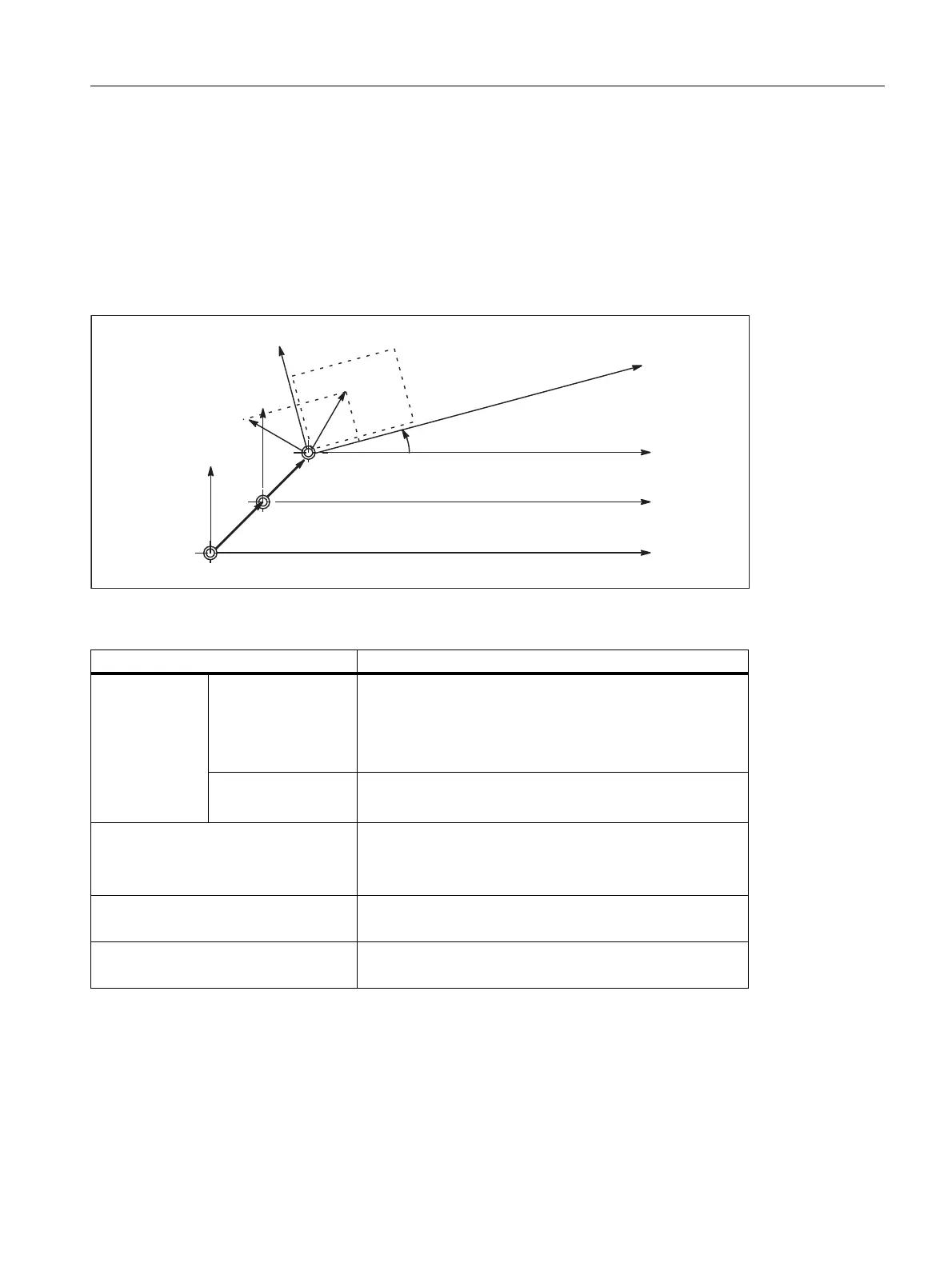
Frame components
Figure 10-1 Frame components
A frame consists of the following components:
Features in relation to axes
The rough and fine offsets, scaling and mirroring can be programmed for geometry and special axes. A rotation
can also be programmed for geometry axes.
Frame components Programmable with:
Offset Rough offset TRANS
ATRANS (additive translation component)
CTRANS (zero offset for multiple axes)
G58 (axial zero offset)
Fine offset CFINE
G59 (axial zero offset)
Rotation ROT / ROTS
AROT / AROTS
CROTS
Scaling
SCALE
ASCALE
Mirroring
MIRROR
AMIRROR
5RXJKRIIVHW
)LQHRIIVHW
5RWDWLRQ
6FDOLQJ
0LUURULQJ

 Loading...
Loading...














