B1: Continuouspath Mode, Exact Stop, LookAhead
3.4 Dynamic adaptations
Basic Functions
182 Function Manual, 09/2011, 6FC5397-0BP40-2BA0
(Refer to "Adaptation of the dynamic path response [Page 183]" for further information about MD20465)
Principle
The minimum value for MD32440 is calculated as f
path
on the basis of the axes involved in the path. For the
smoothing only those acceleration processes are taken into consideration, in which the start and the end velocity
of this motion are reached within the time given below:
t = t
2
-t
1
= 2/f
path
These acceleration processes are dispensed with if the resulting extension in the processing time does not
exceed the limit specified in excess of the smoothing factor (MD20460).
Example
The following parameters are assumed:
MD20460 $MC_LOOKAH_SMOOTH_FACTOR = 10%
MD32440 $MA_LOOKAH_FREQUENCY[AX1] = 20Hz
MD32440 $MA_LOOKAH_FREQUENCY[AX2] = 20 Hz
MD32440 $MA_LOOKAH_FREQUENCY[AX3] = 10 Hz
The path involves the 3 axes X = AX1, Y = AX2, Z = AX3.
The minimum value of MD32440 for these 3 axes is thus 10 Hz. This means that any acceleration, which is
completed within a period of t
2
-t
1
=2/10Hz=200ms, is examined. The time t
2
is the time it takes to reach
velocity v
1
again following an acceleration process starting from velocity v
1
. The extending of the execution time
is also only considered within this range.
If the time t
2
-t
1
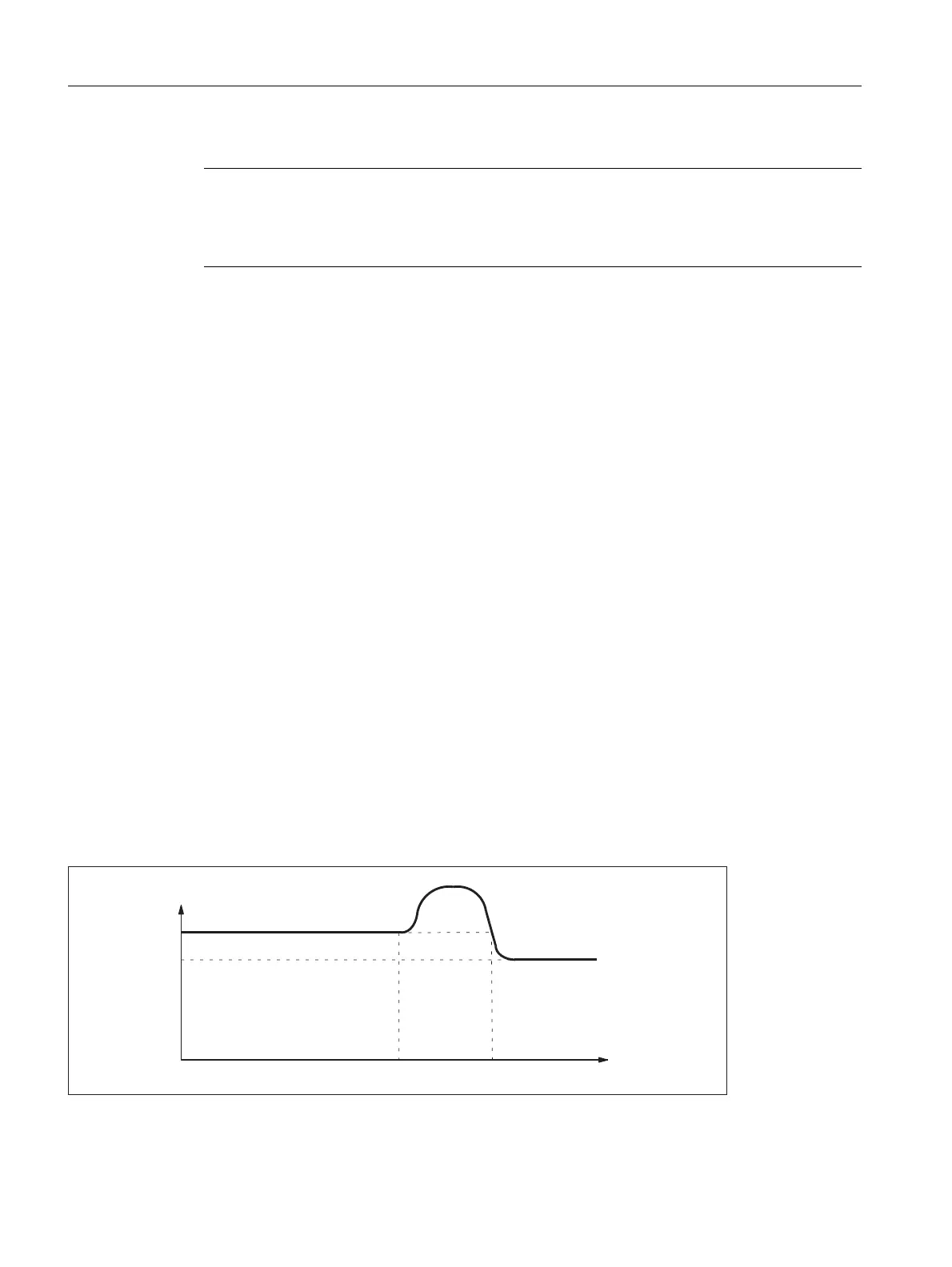
is greater than 200ms or if the additional program execution time t
3
-t
2
is more than 10%
(=MD20460) of t
2
-t
1
, the following time characteristic applies:
Figure 3-7 Characteristic of time-optimum path velocity (without smoothing)
Note
If vibrations are generated in the mechanical system of an axis and if the corresponding
frequency is known, MD32440 should be set to a value smaller than this frequency.
The needed resonance frequencies can be calculated using the built-in measuring functions.
Y
W
W
W
Y
Y

 Loading...
Loading...














