B2: Acceleration
4.2 Functions
Basic Functions
242 Function Manual, 09/2011, 6FC5397-0BP40-2BA0
• MD32439 $MA_MAX_AX_JERK_FACTOR
Factor to set the maximum jerk at higher velocities, i.e. for axis velocities, which are higher than the value set
using $MA_AX_JERK_VEL1. The maximum permissible jerk ( j
max
) of an axis at higher velocities is
calculated as follows:
j
max
= $MA_MAX_AX_JERK_FACTOR * MD32431$MA_MAX_AX_JERK
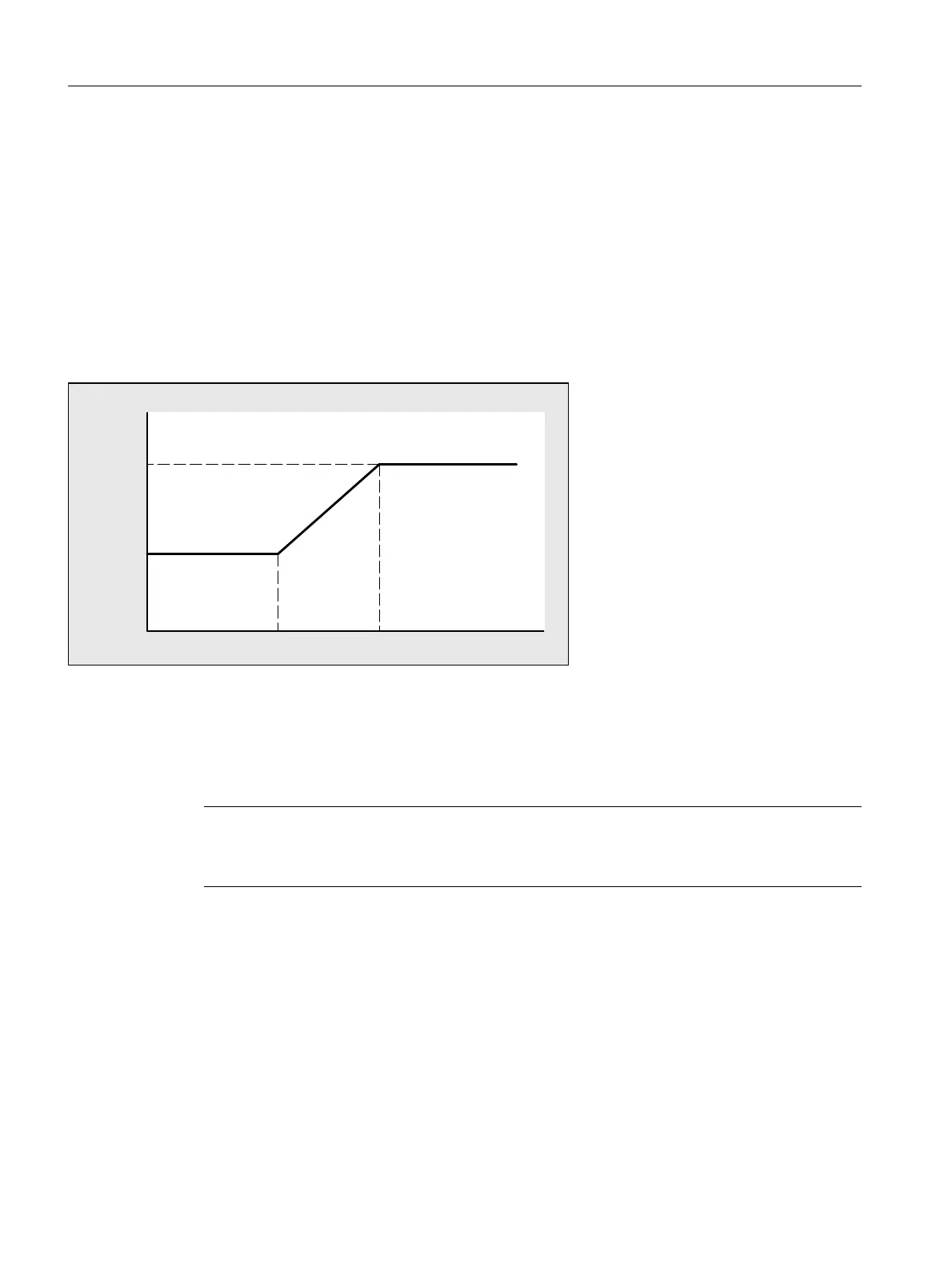
For axis velocities in the range between the threshold values set using $MA_AX_JERK_VEL0 and
$MA_AX_JERK_VEL1, the maximum jerk is linearly increased from $MA_MAX_AX_JERK to
$MA_MAX_AX_JERK_FACTOR*$MA_MAX_AX_JERK.
The factor that is set must be ≥ 1. If a value of 1 is set for this factor, then velocity-dependent jerk adaptation
is not active (basic setting).
Figure 4-5 Dependency of the maximum jerk of an axis on the axis velocity
Example
Example of parameter assignment:
MD32437 $MA_AX_JERK_VEL0 = 3000 mm/min
MD32438 $MA_AX_JERK_VEL1 = 6000 mm/min
MD32439 $MA_MAX_AX_JERK_FACTOR[AX1] = 2.0
MD32439 $MA_MAX_AX_JERK_FACTOR[AX2] = 3.0
MD32439 $MA_MAX_AX_JERK_FACTOR[AX3] = 1.0
v
0
: MD32437 $MA_AX_JERK_VEL0
v
1
: MD32438 $MA_AX_JERK_VEL1
j
0
: MD32431 $MA_MAX_AX_JERK
j
1
: MD32439$MA_MAX_AX_JERK_FACTOR * MD32431 $MA_MAX_AX_JERK
Note
The velocity-dependent jerk adaptation is only active, if:
MD32439$MA_MAX_AX_JERK_FACTOR > 1.0
$[LVYHORFLW\
Y
M
Y
M
PD[LPXP
MHUN

 Loading...
Loading...














