4. Operation
4.2 Operation in Positioner Mode
4-28 ME0342-4B
(2)
Multi-Rotation Specification
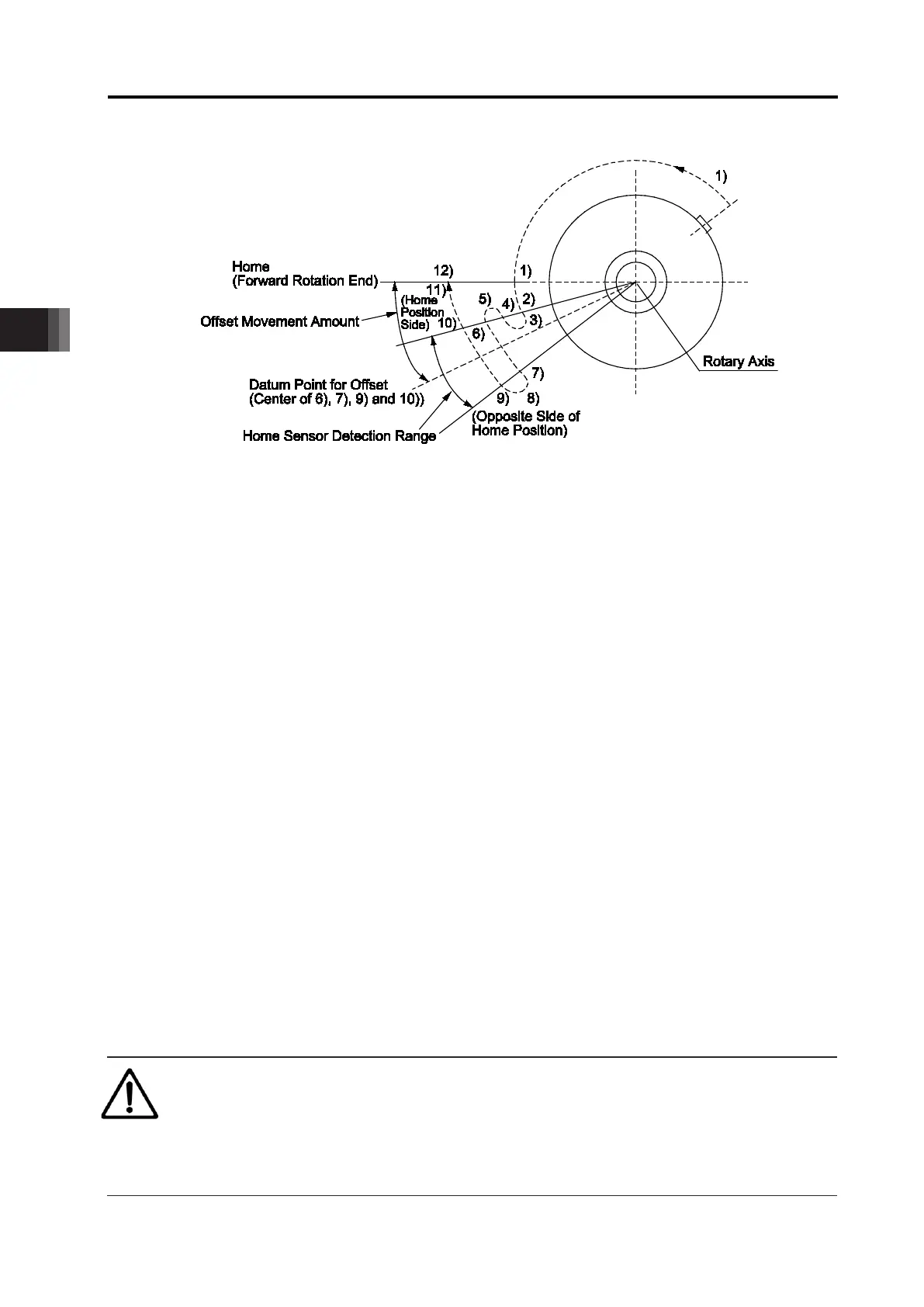
1) Once the home-return command is issued, the actuator rotates in CCW (counterclockwise)
direction from the view point of the load side. The velocity is 20deg/s.
2) Home sensor turns ON.
3) Starts reversed rotation.
4) Goes back to a point exceeded the home sensor detection range, and confirms the home
sensor is turned OFF.
5) Starts reversed rotation.
6) Confirms the home sensor gets turned ON again.
7) Goes to a point exceeded the home sensor detection range on the opposite side of the
home position, and confirms the home sensor is turned OFF.
8) Starts reversed rotation.
9) Confirms the home sensor turns ON.
10) Goes to a point exceeded the home sensor detection range on the home position side, and
confirms the home sensor is turned OFF.
11) Based on the result gained from 6), 7), 9) and 10), the center of the home sensor detection
range is calculated.
12) Moves for the amount set in Parameter No.22 “Home return offset level” from the position of
11), and stops at the home position.
Caution
● In the home reverse specification, the actuator moves in the reverse direction.
● Make sure to refer to [6.1.2 [16]] when a change to Parameter No.22
“Home return offset level” is required.

 Loading...
Loading...







